功能说明
Atlas 200/300/500 推理产品上,不支持本章中的VPC功能。
Atlas 训练系列产品上,不支持本章中的VPC功能。
功能说明
VPC(Vision Preprocessing Core)各功能的介绍、各版本的功能支持度如下表所示。
|
功能 |
描述 |
Atlas 推理系列产品 |
Atlas 200I/500 A2推理产品 |
Atlas A2训练系列产品/Atlas 800I A2推理产品 |
|---|---|---|---|---|
|
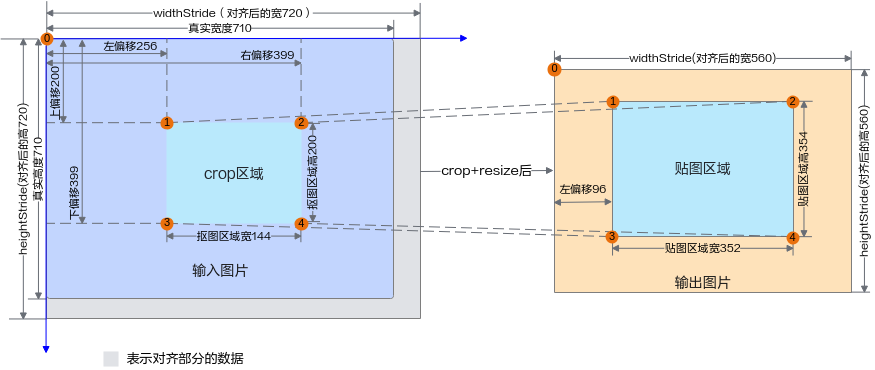
抠图 |
从输入图片中抠出需要用的图片区域,支持一图多框和多图多框。 |
√ |
√ |
√ |
|
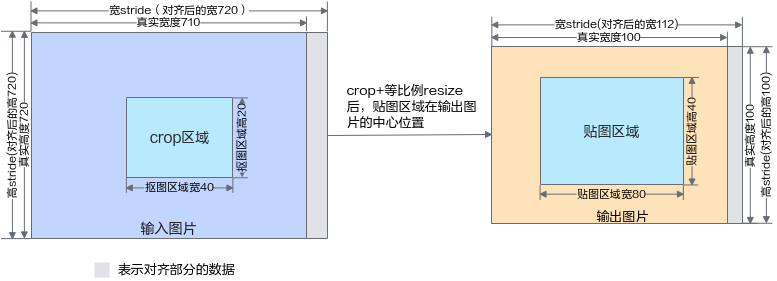
缩放 |
|
√ |
√ |
√ |
|
叠加 |
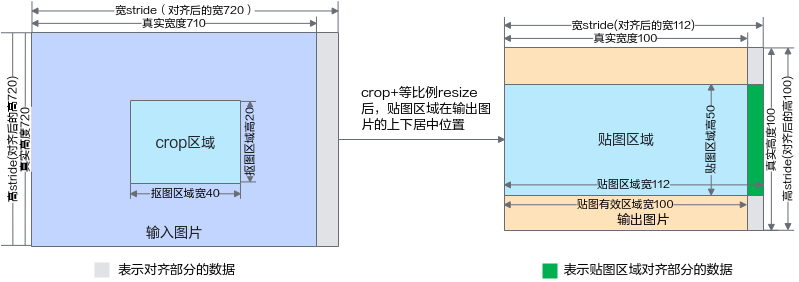
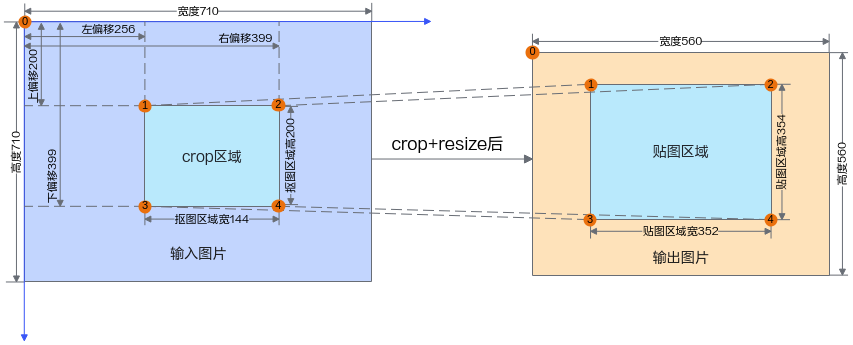
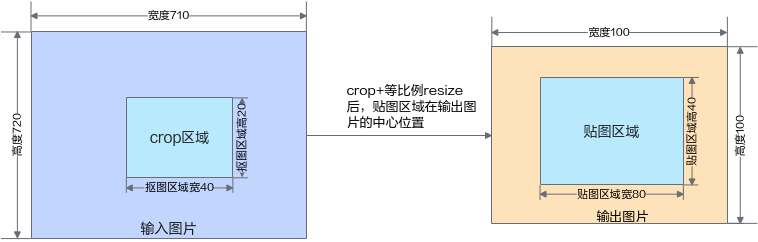
从输入图片中抠出来的图,对抠出的图进行缩放后,放在用户输出图片的指定区域,输出图片可以是空白图片(由用户申请的空输出内存产生的),也可以是已有图片(由用户申请输出内存后将已有图片读入输出内存),只有当输出图片是已有图片时,才表示叠加。 |
√ |
√ |
√ |
|
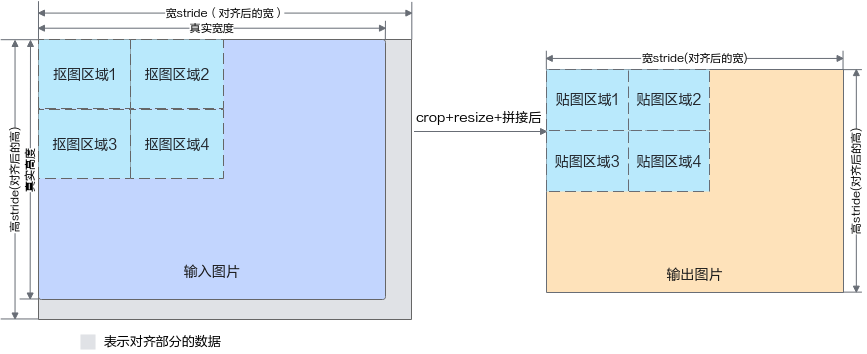
拼接 |
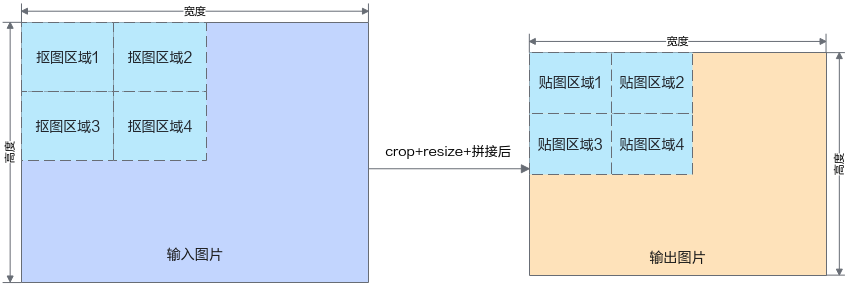
从输入图片中抠多张图片,对抠出的图进行缩放后,放到输出图片的指定区域。 |
√ |
√ |
√ |
|
图像金字塔 |
对原图进行多次高斯滤波之后向下采样产生不同尺寸的图像。 |
√ |
x |
x |
|
直方图统计 |
统计图像每个通道(RGB/YUV)的像素值分布。 |
√ |
√ |
√ |
|
色彩重映射 |
根据配置信息将图片从原图映射为另一张图。 |
√ |
√ |
√ |
|
边界填充 |
对图像进行边界填充。 |
√ |
√ |
√ |
|
格式转换 |
支持RGB格式、YUV格式之间的格式转换。 |
√ |
√ |
√ |
|
图像灰度化 |
将彩色图像转化为灰度图像。需注意,输入为灰度图像、输出只能为灰度图像。 实现图像灰度化的操作是输出YUV400格式的输出图片。 |
√ |
√ |
√ |
|
环视拼接 |
主要用于车载场景生成全景图。 使用该功能时,输入图片为4张,一般为前、左、后、右四个方向的图像,经过畸变矫正、增益补偿、图像融合,最终将4张图片融合成一张全景图片。其中,增益补偿是可选步骤,可在调用参数设置接口时选择是否进行增益补偿,通过增益补偿可平衡不同摄像头光照,达到更好的效果;图像融合当前采用的是加权融合方式,即像素加权平均法。 |
x |
x |
x |
|
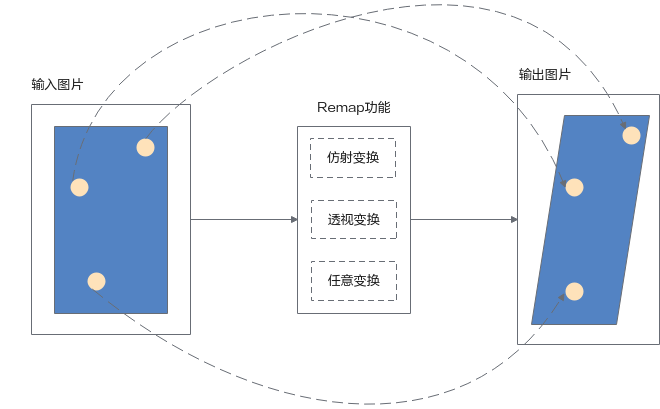
Remap变换 |
根据像素位置LUT对输入图像进行几何形变,典型的用途包括:镜头畸变校正、仿射变换、透视变换,功能示意图请参见图9。 形变方式可以用下述公式描述:dst(x,y)=src(LUT(x,y))。 其中,dst(x,y)为输出图像在坐标(x,y)处的像素值,像素位置LUT(x,y)是输出图像在(x,y)处的像素对应输入图像中的横、纵坐标值,src(LUT(x,y))为输入图像在坐标LUT(x,y)处的像素值。通用的像素位置LUT可通过用户提供的map1(横坐标映射矩阵)和map2(纵坐标映射矩阵)生成,仿射变换或透视变换的像素位置LUT也可通过用户提供的3个点对或4个点对信息计算生成。 |
x |
√ |
√ |
|
滤波 |
对输入图片做滤波处理,当前可支持中值滤波/腐蚀/膨胀/高斯滤波/均值滤波/卷积滤波。 |
x |
√ |
√ |
|
旋转 |
对输入图片做固定角度的旋转,支持90度/180度/270度。 |
x |
√ |
√ |
|
马赛克 |
对输入图片做马赛克处理。 |
x |
√ |
x |
|
覆盖 |
对输入图片做局部覆盖操作。 |
x |
√ |
x |
|
画线 |
对输入图片做画线处理。 |
x |
√ |
x |
|
添加水印 |
对输入图片做添加水印的处理。 |
x |
√ |
x |
功能示意图(Atlas 推理系列产品)

功能示意图(Atlas A2训练系列产品/Atlas 800I A2推理产品)(Atlas 200I/500 A2推理产品)
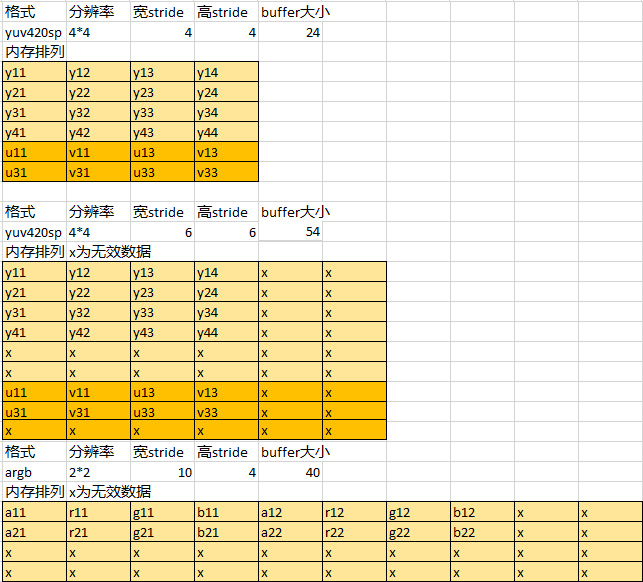
参考说明
RGB、YUV格式图像的各分量排布示意图。示例:SP图像以YUV420SP为例,Packed和RGB图像以ARGB图像为例。