导航功能
- 保持定位功能中所有终端开启并重新开启一个终端,以root用户登录开发者套件,执行以下命令。
ros2 launch ascend_slam navigation_launch.py use_sim_time:=false map_subscribe_transient_local:=true
在RVIZ2中此时可以看到膨胀后的地图。
图1 RVIZ2界面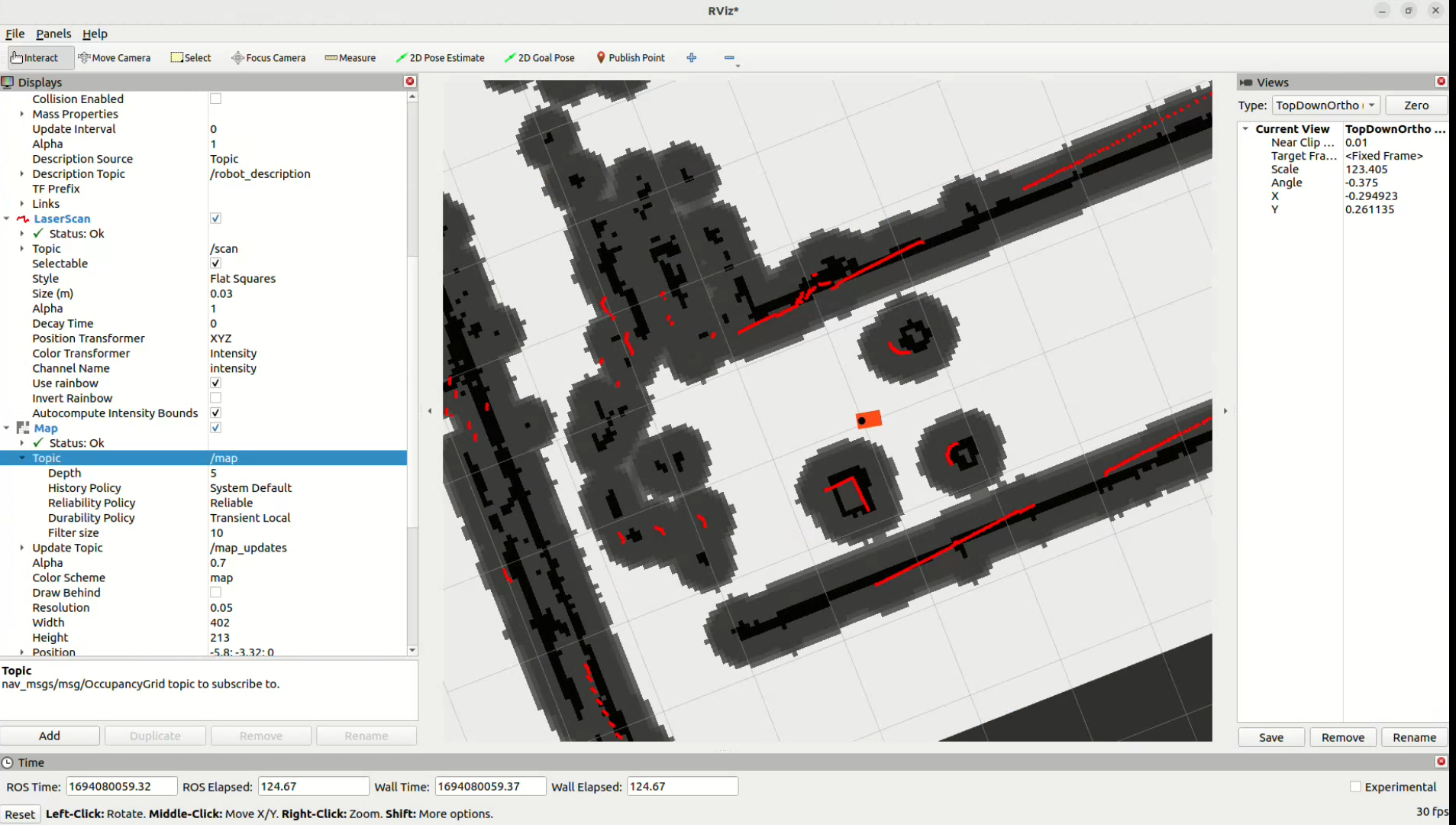
- 单击上方的“2D Goal Pose”按钮,单击地图,按住鼠标左键并拉动一个车头所对准的方向,松开鼠标。随后小车会根据箭头的位置和方向,出现在箭头指向的位置。
随后可看到小车会自行规划路径,在避开障碍物的同时,行驶至指定区域内。
图2 自动避障导航行驶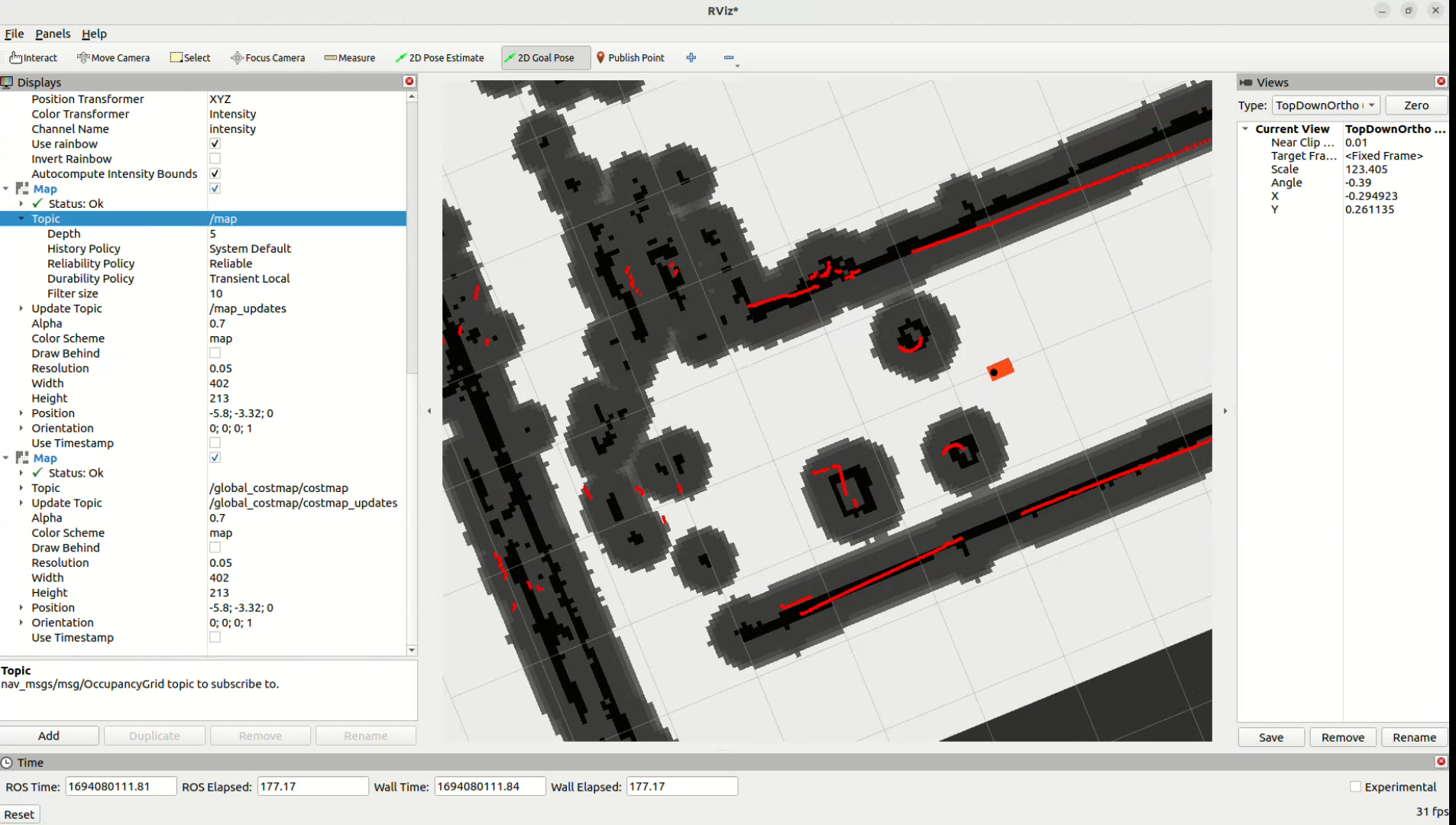
父主题: 快速体验