(可选)校准摄像头
该步骤仅在首次使用机械臂时执行,后续使用时可跳过此步骤。
- 打开新的终端窗口,执行命令进入jupyter notebook。
jupyter notebook --allow-root 192.168.137.100
--allow-root为当前开发者套件的IP,请根据实际IP修改。
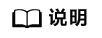
首次进入时可能需要输入登录密码或token。
图1 登录界面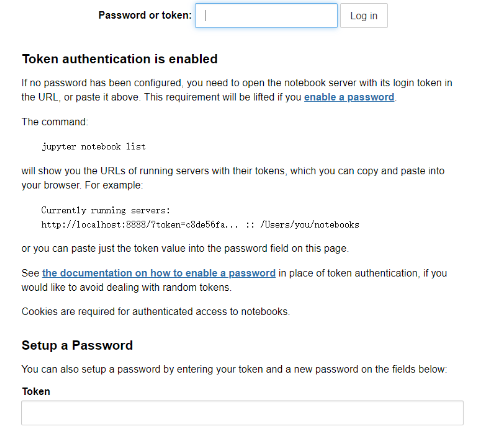
若首次登陆未设置密码,请根据实际回显中的token值登录。回显示例如下,token值为加粗部分。
[I 2023-05-09 08:02:59.683 ServerApp] nbclassic | extension was successfully loaded. [I 2023-05-09 08:02:59.685 ServerApp] Serving notebooks from local directory: /home/HwHiAiUser/samples/notebooks [I 2023-05-09 08:02:59.685 ServerApp] Jupyter Server 1.23.6 is running at: [I 2023-05-09 08:02:59.685 ServerApp] http://192.168.137.100:8888/lab?token=a046a76dc21f1504f271c16278ed62ed7fb014aaf38ee807 [I 2023-05-09 08:02:59.685 ServerApp] or http://127.0.0.1:8888/lab?token=a046a76dc21f1504f271c16278ed62ed7fb014aaf38ee807 [I 2023-05-09 08:02:59.685 ServerApp] Use Control-C to stop this server and shut down all kernels (twice to skip confirmation). [C 2023-05-09 08:02:59.701 ServerApp]
- 在jupyter notebook中逐级进入目录“/root/ros2_robot_arm/ros2_ws/src/dofbot_garbage_yolov5/tools”,双击“相机校准.ipynb”进入代码界面。
- 在代码界面选择“Kernel”选择“Restart & Run All”运行代码。图2 运行代码
若运行后,下方无回显,请多尝试几次。
成功运行后,画面如下所示。
图3 成功运行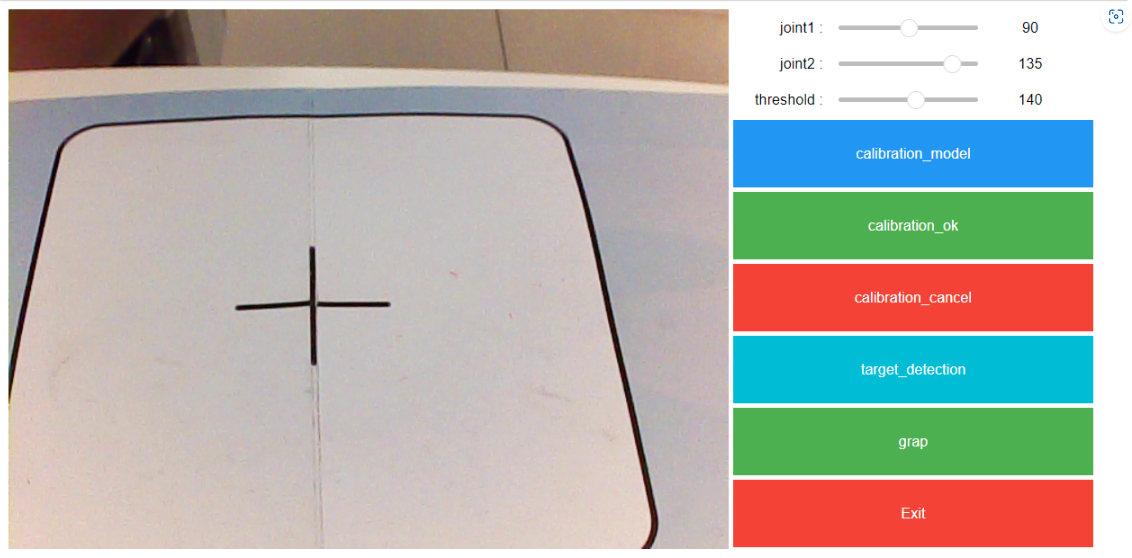
- 开始校准摄像头。
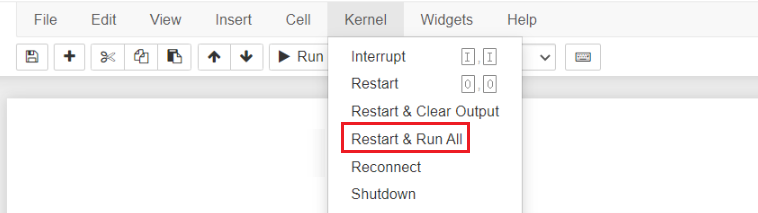
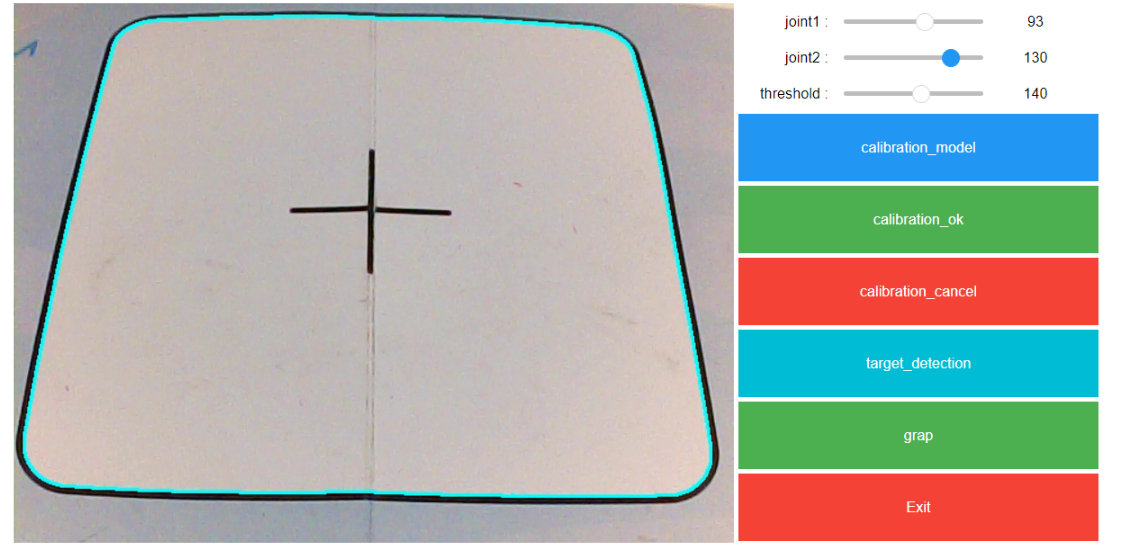
- 单击“calibration_model”按钮,并调节“joint1”与“joint2”。请保证调试环境的光源充足,确保蓝色边框覆盖整个十字框,画面如下所示。
图4 调节画面
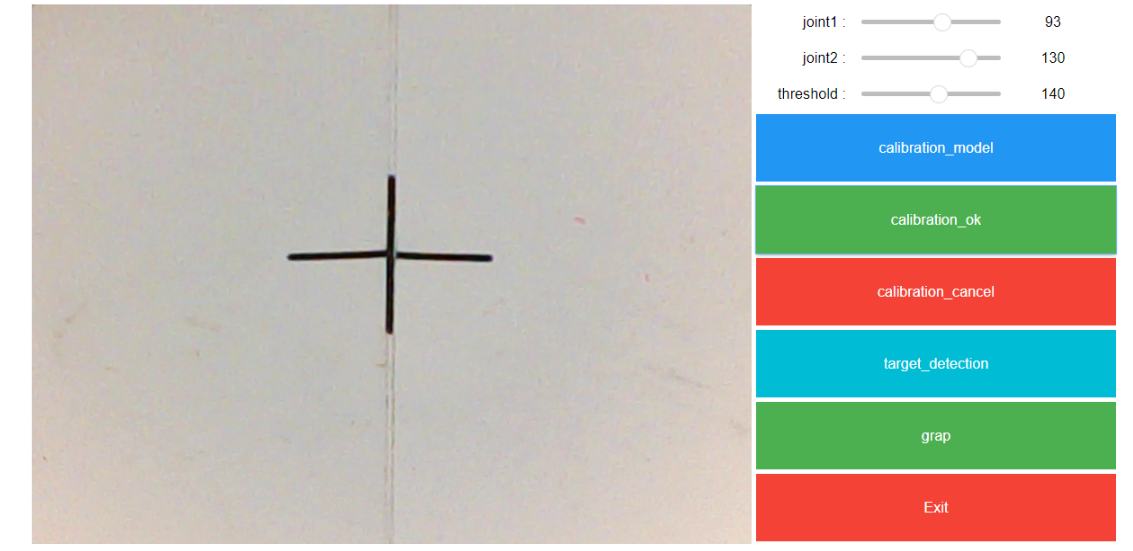
- 单击“calibration_ok”按钮,可视化界面进入方框内部,画面如下所示。
图5 调节成功
- 单击“calibration_model”按钮,并调节“joint1”与“joint2”。请保证调试环境的光源充足,确保蓝色边框覆盖整个十字框,画面如下所示。
- 返回开发者套件终端,按下键盘“Ctrl”+“C”键,停止jupyter notebook程序。
父主题: 快速体验