功能与原理介绍
图1 功能原理图
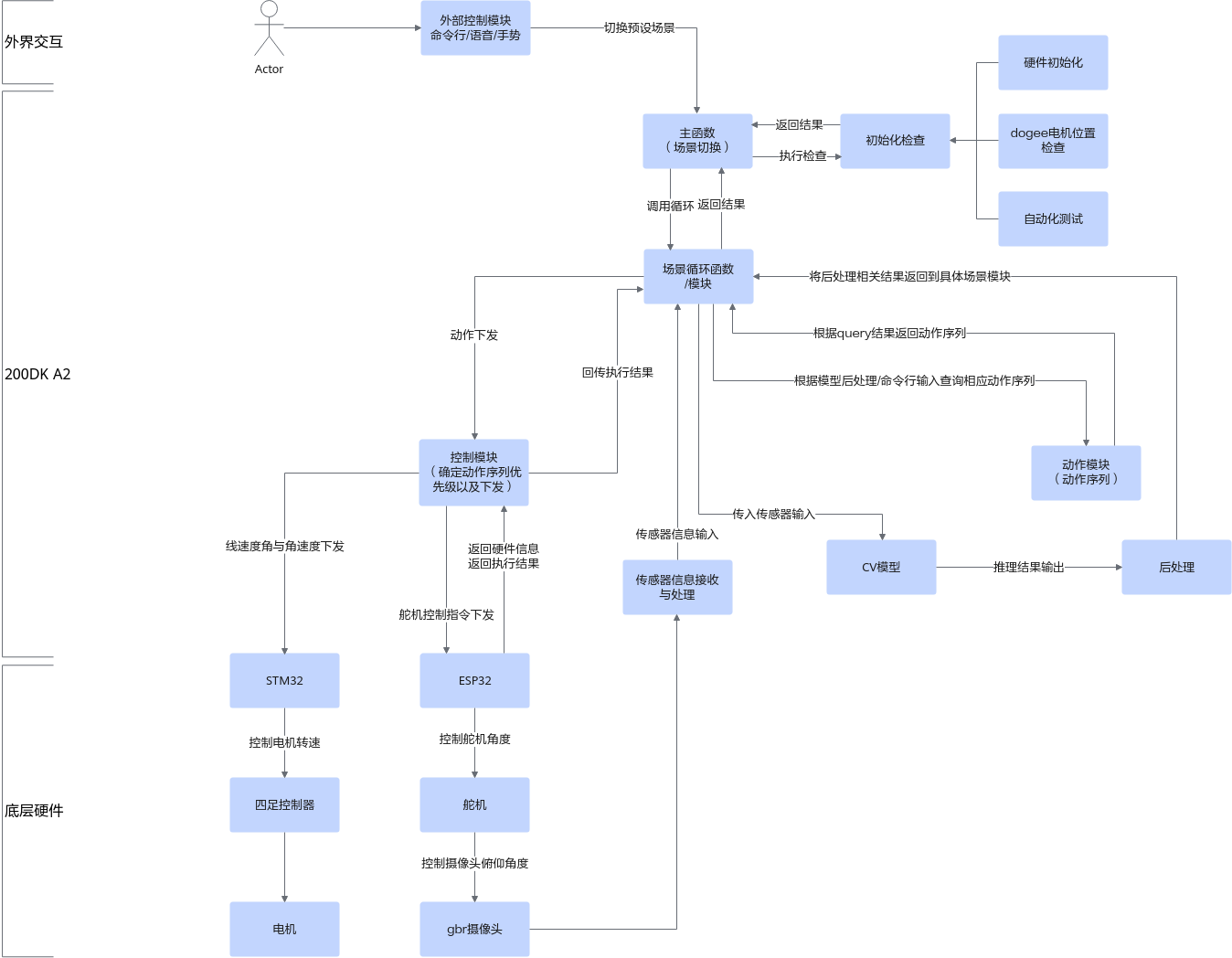
机械狗分为上位机即Atlas 200I DK A2开发者套件板,下位机即STM32和ESP32单片机,通过命令行以及手势语音等方式输入到机械狗上的各类传感器以及上位机上,在场景切换后进入到主函数,初始化各类硬件底层设备完成之后,就可以进入到各个场景对应的模块中进行信息拉取和推理进程了。以摄像头的为例,利用摄像头拉流到视频信息之后,输入到场景循环函数中,经过CV模型得到推理结果,再将后处理的结果回传到场景循环模块中,针对控制模块做动作下发,传递到STM32下位机上控制四足的运动,即可完成一个简单的流程。
父主题: 样例介绍