功能简介
当用户网络中仅Batch的少量维度发生了变化,且维度变化的范围是有限的、可被枚举的,可以开启动态Shape图分档功能。通过将一张图划分为不同档位的方式,使一张图能支持多Batch,提升网络执行性能。
- 对于纯静态图,动态Shape分档功能允许输入Tensor的Shape在指定档位的维度上变化,而静态图的Shape不允许变化。
- 对于纯动态图,不分档的动态图中支持的Shape变化维度多于分档的动态图,而多出来的Shape变化范围很可能不是业务场景所需要的,因此动态图的执行性能会比分档后的动态图性能差。
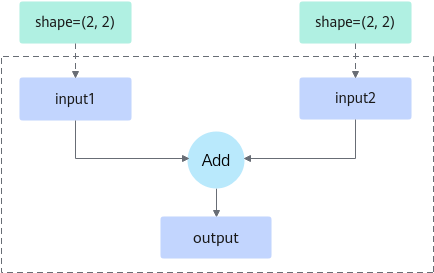
此处以图1为例,阐述三种图执行方式的差异。假设用户图只有Add算子,存在input1、input2、output三个tensor。编译该图时传入的input1与input2的shape都为(2, 2),而用户实际输入时input1与input2的shape有(2, 2)、(2, 2)与(4, 2)、(4, 2)两种。
- 静态图执行:
当torch.compile参数dynamic=False时,编译出的图仅支持shape为input1 (2, 2)、input2 (2, 2),此时执行性能最优,但支持的shape并不满足input1为(4, 2)、input2为(4, 2)的场景。如果输入的shape为input1 (4, 2),input2 (4, 2),将会再次触发编译流程。
- 动态图执行:
当torch.compile参数dynamic=True时,编译出的图支持shape为input1 (-1, -1)、input2 (-1, -1),此时图不仅支持input1与input2 shape为(2, 2)、(4, 2)两种场景,还支持(3, 3)、(4, 4)等任意input1与input2 shape相等的场景。由于动态图中算子的shape可变,无法一次将图中任务全部下发至Device计算,只能先下发一部分,返回计算结果后再下发另一部分,因此其执行性能比静态图差。
shape中的“-1”表示取值范围为1~正无穷。
- 动态shape图分档执行:torch.compile或模型编译缓存功能编译出的图支持shape为input1 (-1, 2)、input2 (-1, 2) 。假设“-1”所在维度的档位设为[2, 2]、[4, 4],其中[]表示shape支持变化的范围。
- 档位1的[2, 2]:input1 shape为(2, 2), input2 shape为(2, 2)
- 档位2的[4, 4]:input1 shape为(4, 2), input2 shape为(4, 2)
换言之整个分档图只支持这两种shape规格的输入。如果开启动态shape分档,会将每个档位的图转换为静态子图,能一次全部下发到Device侧,因此执行性能优于动态图。
shape中的“-1”表示该维度支持被划分档位。
使用约束
- 面向推理服务场景。
- 该功能仅适用于整图优化场景。
- set_dim_gears接口优先级高于torch.compile中的dynamic=True或False,即对于Tensor类型的输入只有set_dim_gears的Tensor以及维度会被泛化。
- 该功能暂不支持同时配置Dynamo导图功能、使能RefData类型转换功能。
使用方法
以图1为例,动态分档的关键操作如下:
- 在模型脚本中通过set_dim_gears接口设置档位。
- 支持对同一个Tensor设置一个或者多个维度的档位。
- 若图编译、执行时Tensor的shape不在设置的档位中,会导致编译或执行报错,请合理设置档位值。
- 不支持对同一个tensor使用该接口设置两次不一样的档位。
- 生成的总档位数量要不大于100。
- 首次执行时对输入tensor设置档位即可,保证首次编译时能够获取到档位,后续执行时无需设置档位,避免因为设置档位的动作造成性能下降。
1 2 3 4 5
import torch, torch_npu, torchair input1 = torch.ones(2, 2).npu() input2 = torch.ones(2, 2).npu() torchair.inference.set_dim_gears(input1, dim_gears={0:[2, 4]}) torchair.inference.set_dim_gears(input2, dim_gears={0:[2, 4]})
- (可选)在模型脚本中设置动态分档的组合模式。
通过torchair.get_npu_backend中compiler_config配置,示例如下,参数介绍参见表1。
1 2 3 4 5 6
import torch_npu, torchair config = torchair.CompilerConfig() # 动态分档组合模式配置 config.inference_config.dynamic_gears_merge_policy = "zip" npu_backend = torchair.get_npu_backend(compiler_config=config) opt_model = torch.compile(model, backend=npu_backend)
表1 参数说明 参数名
参数说明
dynamic_gears_merge_policy
指定动态分档组合模式。若采用zip模式配置档位繁琐时,可使用product模式配置。
- zip(缺省值):位置一一对应。
- product:排列组合,可以组合成更多的档位。
说明:举个例子,当input3输入的shape为(2, 10),若想要对其划分6个档位(2, 10)、(3, 10)、(4, 10)、(2, 20)、(3, 20)、(4, 20),两种组合模式的配置代码如下:
- zip模式,档位配置复杂
1torchair.inference.set_dim_gears(input3, dim_gears={0:[2, 3, 4, 2, 3, 4], 1:[10, 10, 10, 20, 20, 20]})
- product,档位配置简单
1torchair.inference.set_dim_gears(input3, dim_gears={0:[2, 3, 4], 1:[10, 20]})
按步骤1中配置,不同组合模式的档位结果如下:
- zip:input1、input2档位划分结果为[2, 2]、[4, 4],即input1、input2的shape支持(2, 2)、(2, 2)与(4, 2)、(4, 2)两种档位。
- product:input1、input2档位划分结果为[2, 2]、[2, 4]、[4, 2]、[4, 4],即input1、input2的shape支持(2, 2)、(2, 2);(2, 2)、(4, 2);(4, 2)、(2, 2);(4, 2)、(4, 2)四种档位。其中input1、input2的shape为(2, 2)、(4, 2)与(4, 2)、(2, 2)两种档位在图1中不符合相同shape相加的规则。
后续操作
在模型脚本中设置动态分档后,再次执行模型脚本,验证分档结果是否符合预期。
假设模型脚本定义如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 | import torch import torch_npu import torchair from torchair.configs.compiler_config import CompilerConfig class Model(torch.nn.Module): def __init__(self): super().__init__() def forward(self, x1, x2): return x1 + x2 config = CompilerConfig() # 缺省为zip模式,也支持设置product模式 # config.inference_config.dynamic_gears_merge_policy = "zip" npu_backend = torchair.get_npu_backend(compiler_config=config) model = Model().npu() # 必须整图编译 model = torch.compile(model, fullgraph=True, backend=npu_backend) npu_input0 = torch.ones([2, 2]).npu() npu_input1 = torch.ones([2, 2]).npu() # 设置档位 torchair.inference.set_dim_gears(npu_input0, {0: [2, 4]}) torchair.inference.set_dim_gears(npu_input1, {0: [2, 4]}) # 首次编译+执行,shape为(2,2)、(2,2) print(model(npu_input0, npu_input1)) # 再次执行,shape为(4,2)、(4, 2)在档位中,不会触发重新编译 npu_input0 = torch.ones([4, 2]).npu() npu_input1 = torch.ones([4, 2]).npu() print(model(npu_input0, npu_input1)) |
开启TorchAir C++层日志,会显示图被划分的档位信息:
1 2 3 4 5 6 7 8 9 10 11 12 | [INFO] TORCHAIR [concrete_graph/concrete_graph.cpp:123] Compiling concrete graph 0 with options: [INFO] TORCHAIR [concrete_graph/concrete_graph.cpp:125] ge.deterministic = 0 [INFO] TORCHAIR [concrete_graph/concrete_graph.cpp:125] ge.dynamicDims = 2,2;4,4 [INFO] TORCHAIR [concrete_graph/concrete_graph.cpp:125] ge.dynamicNodeType = 1 [INFO] TORCHAIR [concrete_graph/concrete_graph.cpp:125] ge.exec.atomicCleanPolicy = 1 [INFO] TORCHAIR [concrete_graph/concrete_graph.cpp:125] ge.exec.memoryOptimizationPolicy = MemoryPriority [INFO] TORCHAIR [concrete_graph/concrete_graph.cpp:125] ge.exec.outputReuseMemIndexes = 0 [INFO] TORCHAIR [concrete_graph/concrete_graph.cpp:125] ge.exec.reuseZeroCopyMemory = 1 [INFO] TORCHAIR [concrete_graph/concrete_graph.cpp:125] ge.featureBaseRefreshable = 0 [INFO] TORCHAIR [concrete_graph/concrete_graph.cpp:125] ge.inputShape = arg1_1:-1,2;arg2_1:-1,2 [INFO] TORCHAIR [concrete_graph/concrete_graph.cpp:125] ge.jit_compile = 2 [INFO] TORCHAIR [concrete_graph/concrete_graph.cpp:125] ge.topoSortingMode = 1 |
对应支持的档位如下,符合用户预期的档位。
- 档位1:npu_input0 shape=(2, 2),npu_input1 shape=(2, 2)。
- 档位2:npu_input0 shape=(4, 2),npu_input1 shape=(4, 2)。