hi_isp_frame_info
说明
定义 ISP 实时信息。
定义
typedef struct {
hi_u32 iso;
hi_u32 exposure_time;
hi_u32 isp_dgain;
hi_u32 again;
hi_u32 dgain;
hi_u32 ratio[3];
hi_u32 isp_nr_strength;
hi_u32 f_number;
hi_u32 sensor_id;
hi_u32 sensor_mode;
hi_u32 hmax_times;
hi_u32 vmax;
hi_u32 vc_num;
hi_u64 fsync_timestamp;
hi_u64 fs_timestamp;
hi_u64 fe_timestamp;
hi_u64 pe_timestamp;
hi_s64 motion_filter[9];
hi_u32 reserved[10];
} hi_isp_frame_info;
成员
成员名称 |
描述 |
|---|---|
iso |
当前sensor模拟增益*sensor数字增益*ISP数字增益*100。仅作PQ调测参考使用。 |
exposure_time |
曝光时间,单位是微秒(us)。仅作PQ调测参考使用。 |
isp_dgain |
ISP数字增益。仅作PQ调测参考使用。 |
again |
Sensor的模拟增益。仅作PQ调测参考使用。 |
dgain |
Sensor的数字增益。仅作PQ调测参考使用。 |
ratio |
多帧合成WDR相邻2帧默认曝光比。仅作PQ调测参考使用。 |
isp_nr_strength |
ISP的NR强度。当前未支持,默认值为0。 |
f_number |
当前使用的镜头的F值。仅作PQ调测参考使用。 |
sensor_id |
当前使用的sensorID。仅作PQ调测参考使用。 |
sensor_mode |
当前使用的sensor序列模式。仅作PQ调测参考使用。 |
hmax_times |
当前使用的sensor对应读出一行的时间,单位是纳秒(ns)。仅作PQ调测参考使用。 |
vmax |
sensor每帧实际生效的总行数,单位是行。仅作PQ调测参考使用。 |
vc_num |
当前未支持,默认值为0。当前未支持,默认值为0。 |
fsync_timestamp |
发出fsync曝光同步信号的时间。 |
fs_timestamp |
收到sensor模组FrameStart信号的时间,仅做参考,会受CPU负载以及调度而存在误差。 |
fe_timestamp |
收到sensor模组FrameEnd信号的时间,仅做参考,会受CPU负载以及调度而存在误差。 |
pe_timestamp |
ISP处理完成后输出图像的时间,仅做维测参考使用。 |
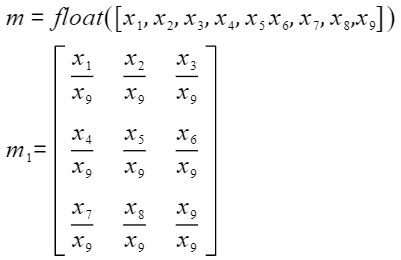
motion_filter |
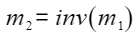
数字防抖的3*3仿射变换矩阵,15bit 小数精度。该值无需用户设置,是开启数字防抖后自动生成的值。用户不能直接使用该矩阵作为仿射变化矩阵,完成以下步骤后可得到仿射变换矩阵: (1)转换为浮点类型做归一化处理
(2)求m1的逆矩阵,最终得到m2矩阵,m2矩阵可与图像直接进行运算
(3)m2矩阵与输入图像进行相乘可得到校正后的图像
|
reserved |
预留字段,默认输出为0。 |