扩展算子规则
扩展算子的实现可以在Caffe、TensorFlow、MindSpore深度学习框架中实现,扩展算子中的第一种是基于Caffe框架进行扩展实现的,如ROIPooling、PSROIPooling、Normalize和Upsample层等,因此有公开的prototxt标准定义。而扩展算子中的第二种并不是在Caffe框架下实现的,对于这类网络中的自定义算子,也需要给出prototxt的标准定义,用于在prototxt中定义网络中相应的算子。
Reverse
在指定的轴上反序,如输入为[1,2,3],其反序为[3,2,1]。
算子定义如下:
- 在LayerParameter中添加ReverseParameter
message LayerParameter { ... optional ReverseParameter reverse_param = 157; ... } - 定义ReverseParameter类型以及属性参数
message ReverseParameter{ repeated int32 axis = 1; }
ROIPooling
在目标检测算法中,region proposal产生的ROI大小不一,而分类网络的FC层要固定的输入,所以ROIPooing起到一个连接作用。
ROIPooling层为Faster RCNN网络中用于将不同图像经过卷积层后得到的feature map进行维度统一的操作,输入为一个feature map以及需要从中提取的ROI框坐标值,输出为一个维度归一化的feature map。
ROIPooling层需要对caffe.proto文件进行扩展,定义ROIPoolingParameter,扩展方式如下所示,定义的参数包括:
- spatial_scale,即输入feature map与原始图片的尺寸比例,用于转换ROI的坐标,因为ROI坐标是在原图尺寸上的。
- pooled_h、pooled_w,输出feature map在spatial维度上h和w的大小。
- 在LayerParameter中添加ROIPoolingParameter
message LayerParameter { ... optional ROIPoolingParameter roi_pooling_param = 161; ... } - 定义ROIPoolingParameter类型以及属性参数
message ROIPoolingParameter { required int32 pooled_h = 1; required int32 pooled_w = 2; optional float spatial_scale = 3 [default=0.0625]; optional float spatial_scale_h = 4; optional float spatial_scale_w = 5; }
基于上述原则,ROIPooling层在prototxt中定义的代码样例如下:
layer {
name: "roi_pooling"
type: "ROIPooling"
bottom: "res4f"
bottom: "rois"
bottom: "actual_rois_num"
top: "roi_pool"
roi_pooling_param {
pooled_h: 14
pooled_w: 14
spatial_scale:0.0625
spatial_scale_h:0.0625
spatial_scale_w:0.0625
}
}PSROIPooling
PSROIPooling层的操作与ROIPooling层类似,不同之处在于不同空间维度输出的图片特征来自不同的feature map channels,且对每个小区域进行的是Average Pooling,不同于ROIPooling的Max Pooling。
对于一个输出 k*k 的结果,不同空间维度的特征取自输入feature map中不同的组,即将输入的feature map均匀分为k*k组,每组的channel数与输出的channel一致,得到上述输出。
PSROIPooling层需要对caffe.proto文件进行扩展,定义PSROIPoolingParameter,扩展方式如下所示,定义的参数包括:
- spatial_scale,即输入feature map与原始图片的尺寸比例。
- output_dim,输出feature map的channel。
- group_size,输出的spatial维度,即上述的k。
- 在LayerParameter中添加PSROIPoolingParameter
message LayerParameter { ... optional PSROIPoolingParameter psroi_pooling_param = 207; ... } - 定义PSROIPoolingParameter类型以及属性参数
message PSROIPoolingParameter { required float spatial_scale = 1; required int32 output_dim = 2; // output channel number required int32 group_size = 3; // number of groups to encode position-sensitive score maps }
基于上述原则,PSROIPooling层在prototxt中定义的代码样例如下:
layer {
name: "psroipooling"
type: "PSROIPooling"
bottom: "some_input"
bottom: "some_input"
top: "some_output"
psroi_pooling_param {
spatial_scale: 0.0625
output_dim: 21
group_size: 7
}
}
Upsample
Upsample层为Pooling层的逆操作,其中每个Upsample层均与网络之前一个对应大小输入、输出Pooling层一一对应,完成feature map在spatial维度上的扩充。
Upsample层需要对caffe.proto文件进行扩展,定义UpsampleParameter,扩展方式示例如下所示。 定义的参数包括stride,即输出与输入的尺寸比例,如2。
- 在LayerParameter中添加UpsampleParameter
message LayerParameter { ... optional UpsampleParameter upsample_param = 160; ... } - 定义UpsampleParameter类型以及属性参数
message UpsampleParameter{ optional float scale = 1[default = 1]; optional int32 stride = 2[default = 2]; optional int32 stride_h = 3[default = 2]; optional int32 stride_w = 4[default=2]; }
基于上述原则,Upsample在prototxt中定义的代码样例如下:
layer {
name: "layer86-upsample"
type: "Upsample"
bottom: "some_input"
top: "some_output"
upsample_param {
scale: 1
stride: 2
}
}Normallize
Normalize层为SSD网络中的一个归一化层,主要作用是将空间或者通道内的元素归一化到0到1之间,其进行的操作为对于一个c*h*w的三维tensor,输出是同样大小的tensor,其中间计算为每个元素以channel方向的平方和的平方根求 normalize,其具体计算公式为:
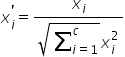
其中分母位置的平方和的累加向量为同一h与w位置的所有c方向的向量,如图1中的橙色区域。
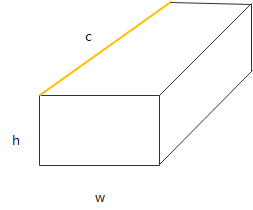
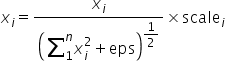
经过上述计算归一化后,再对每个feature map做scale,每个channel对应一个scale值。
Normalize层需要对caffe.proto文件进行扩展,定义NormalizeParameter,扩展方式如下所示。定义的参数包括:
- across_spatial参数表示是否对整个图片进行归一化,归一化的维度为:1 x c x h x w,否则对每个像素点进行归一化:1 x c x 1 x 1。
- channels_shared表示scale是否相同,如果为true,则scale都是一样的,否则对于channel一样,对不同channel像素点是不一样的,默认为True。
- eps防止normalize过程中除以0的一个很小数值,默认为1e-10,可配置。
normalize的计算公式转换为:
算子定义如下:
- 在LayerParameter中添加NormalizeParameter
message LayerParameter { ... optional NormalizeParameter norm_param = 206; ... } - 定义NormalizeParameter类型以及属性参数
message NormalizeParameter { optional bool across_spatial = 1 [default = true]; // Initial value of scale. Default is 1.0 for all optional FillerParameter scale_filler = 2; // Whether or not scale parameters are shared across channels. optional bool channel_shared = 3 [default = true]; // Epsilon for not dividing by zero while normalizing variance optional float eps = 4 [default = 1e-10]; }
基于上述原则,Normalize在prototxt中定义的代码样例如下:
layer {
name: "normalize_layer"
type: "Normalize"
bottom: ""some_input"
top: "some_output"
norm_param {
across_spatial: false
scale_filler {
type: "constant"
value: 20
}
channel_shared: false
}
}Reorg
Reorg算子在昇腾AI处理器内部以PassThrough算子呈现,将通道数据转移到平面上,或反过来操作。
PassThrough层为Yolo v2中的一个自定义层,由于Yolo v2并不是使用Caffe框架实 现,因此对于该层没有标准的定义。该层实现的功能为将feature map在spatial维度上的数据展开到channel维度上,原始在channel维度上连续的元素在展开后的feature map中依然是连续的。
算子定义如下:
- 在LayerParameter中添加ReorgParameter
message LayerParameter { ... optional ReorgParameter reorg_param = 155; ... } - 定义ReorgParameter类型以及属性参数
message ReorgParameter{ optional uint32 stride = 2 [default = 2]; optional bool reverse = 1 [default = false]; }
基于上述原则,Reorg在prototxt中定义的代码样例如下:
layer {
bottom: "some_input"
top: "some_output"
name: "reorg"
type: "Reorg"
reorg_param {
stride: 2
}
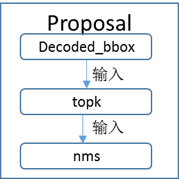
}Proposal
Proposal算子根据rpn_cls_prob的foreground,rpn_bbox_pred中的bounding box regression修正anchors获得精确的proposals。
具体可以分为3个算子decoded_bbox、topk和nms,实现如图2所示。
算子定义如下:
- 在LayerParameter中添加ProposalParameter
message LayerParameter { ... optional ProposalParameter proposal_param = 201; ... } - 定义ProposalParameter类型以及属性参数
message ProposalParameter { optional float feat_stride = 1 [default = 16]; optional float base_size = 2 [default = 16]; optional float min_size = 3 [default = 16]; repeated float ratio = 4; repeated float scale = 5; optional int32 pre_nms_topn = 6 [default = 3000]; optional int32 post_nms_topn = 7 [default = 304]; optional float iou_threshold = 8 [default = 0.7]; optional bool output_actual_rois_num = 9 [default = false]; }
基于上述原则,Proposal在prototxt中定义的代码样例如下:
layer {
name: "faster_rcnn_proposal"
type: "Proposal" // 算子Type
bottom: "rpn_cls_prob_reshape"
bottom: "rpn_bbox_pred"
bottom: "im_info"
top: "rois"
top: "actual_rois_num" // 增加的算子输出
proposal_param {
feat_stride: 16
base_size: 16
min_size: 16
pre_nms_topn: 3000
post_nms_topn: 304
iou_threshold: 0.7
output_actual_rois_num: true
}
}
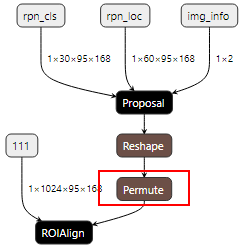
如果用户的网络模型中存在“Proposal+ROIAlign+业务算子”相关的网络结构,由于Proposal算子的输出为3维,而ROIAlign算子的rois是2维,因此需要在Proposal算子后面增加Reshape算子,用来改变Tensor shape,然后作为ROIAlign的输入。但该场景下输入给ROIAlign算子的rois框数据,坐标排序混乱,不符合ROIAlign算子的要求。
基于上述问题,需要在Reshape算子后再增加Permute算子,进行转置之后,再次输出的数据符合ROIAlign算子的要求。
修改后的网络结构样例如下:
对应修改后的prototxt中代码样例如下:
layer {
name: 'proposal'
type: 'Proposal'
bottom: 'rpn_cls'
bottom: 'rpn_loc'
bottom: 'img_info'
top: 'roi_proposal'
proposal_param {
feat_stride: 16
pre_nms_topn: 1000
post_nms_topn: 16
nms_thresh: 0.7
base_size: 16
min_size: 8
ratio: [0.5, 1.0, 2.0]
scale: [32, 64, 128, 256, 512]
}
}
layer {
name: "Reshape1"
type: "Reshape"
bottom: "roi_proposal"
top: "roi_proposal_reshape"
reshape_param {
shape {
dim: 5
dim: 16
}
}
}
layer {
name: "Permute1"
type: "Permute"
bottom: "roi_proposal_reshape"
top: "roi_proposal_permute"
permute_param {
order: 1
order: 0
}
}
layer {
name: "align"
type: "ROIAlign"
bottom: "111"
bottom: "roi_proposal_permute"
top: "align"
roi_align_param {
pooled_w: 14
pooled_h: 14
spatial_scale: 0.0625
}
}
ROIAlign
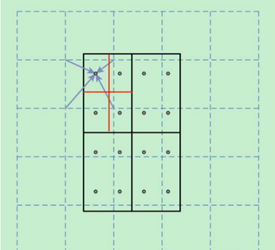
ROIAlign是在Mask-RCNN论文里提出的一种区域特征聚集方式, 与ROIPooling算法进行改进:用双线性插值替换ROIPooling操作中两次量化,以解决ROIPooling造成的区域不匹配的问题,提高检测准确性。
ROIAlign算子是从feature map中获取ROI(range of interest),分为pooled_w x pooled_h 个单元格,每个单元格均分为sampling_ratio*sampling_ratio个小方格,每个小方格的中心点就是采样点。如图3所示,虚线部分表示feature map,实线表示ROI,这里将ROI切分成2x2的单元格。如果采样点数是4,则首先将每个单元格子均分成四个小方格(如红色线所示),每个小方格中心就是采样点。由于采样点的坐标通常是浮点数,所以需要对采样点像素进行双线性插值(如图3中的四个箭头所示),就可以得到该像素点的值了。然后对每个单元格内的四个采样点取均值,就可以得到最终的ROIAlign的结果。
算子定义如下:
- 在LayerParameter中添加ROIAlignParameter
message LayerParameter { ... optional ROIAlignParameter roi_align_param = 154; ... } - 定义ROIAlignParameter类型以及属性参数
message ROIAlignParameter { // Pad, kernel size, and stride are all given as a single value for equal // dimensions in height and width or as Y, X pairs. optional uint32 pooled_h = 1 [default = 0]; // The pooled output height optional uint32 pooled_w = 2 [default = 0]; // The pooled output width // Multiplicative spatial scale factor to translate ROI coords from their // input scale to the scale used when pooling optional float spatial_scale = 3 [default = 1]; optional int32 sampling_ratio = 4 [default = -1]; optional int32 roi_end_mode = 5 [default = 0]; }
根据上述类型以及属性用户可以自定义prototxt。
ShuffleChannel
ShuffleChannel是把channel维度分为[group, channel/Group],然后再在channel维度中进行数据转置[channel/Group,group]。
例如对于channel=4,group=2,则执行此算子后,就是把channel[1]、channel[2]的数据交换位置。
算子定义如下:
- 在LayerParameter中添加ShuffleChannelParameter
message LayerParameter { ... optional ShuffleChannelParameter shuffle_channel_param = 159; ... } - 定义ShuffleChannelParameter类型以及属性参数
message ShuffleChannelParameter{ optional uint32 group = 1[default = 1]; // The number of group }
基于上述原则,ShuffleChannel在prototxt中定义的代码样例如下:
layer {
name: "layer_shuffle"
type: "ShuffleChannel"
bottom: "some_input"
top: "some_output"
shuffle_channel_param {
group: 3
}
}
Yolo
YOLO算子出现在YOLO V2网络,且目前仅在YOLO V2、V3网络中使用,对数据做sigmoid和softmax操作。
- 在YOLO V2中,根据background和softmax的参数,有4种场景:
- background=false,softmax=true,
- background=false,softmax=false,
- background=true,softmax=false,
- background=true,softmax= true,
- 在YOLO V3中,只有一种场景:对(x,y,h,w)中的(x,y)做sigmoid,对b做sigmoid,对classes做sigmoid。
输入数据格式为Tensor(n, coords+backgroup+classes,l.h,l.w),其中n是anchor box的数量,coords表示x,y,w,h。
算子定义如下:
- 在LayerParameter中添加YoloParameter
message LayerParameter { ... optional YoloParameter yolo_param = 199; ... } - 定义YoloParameter类型以及属性参数
message YoloParameter { optional int32 boxes = 1 [default = 3]; optional int32 coords = 2 [default = 4]; optional int32 classes = 3 [default = 80]; optional string yolo_version = 4 [default = "V3"]; optional bool softmax = 5 [default = false]; optional bool background = 6 [default = false]; optional bool softmaxtree = 7 [default = false]; }
基于上述原则,Yolo在prototxt中定义的代码样例如下:
layer {
bottom: "layer82-conv"
top: "yolo1_coords"
top: "yolo1_obj"
top: "yolo1_classes"
name: "yolo1"
type: "Yolo"
yolo_param {
boxes: 3
coords: 4
classes: 80
yolo_version: "V3"
softmax: true
background: false
}
}
PriorBox
根据输入的参数,生成prior box。
下面以conv7_2_mbox_priorbox为例,根据对应的参数生成prior box的数量。定义如下:
layer{
name:"conv7_2_mbox_priorbox"
type:"PriorBox"
bottom:"conv7_2"
bottom:"data"
top:"conv7_2_mbox_priorbox"
prior_box_param{
min_size:162.0
max_size:213.0
aspect_ratio:2
aspect_ratio:3
flip:true
clip:false
variance:0.1
variance:0.1
variance:0.2
variance:0.2
img_size:300
step:64
offset:0.5
}
}
- 宽高都为minsize生成prior box。
- 如果存在max_size, 则用sqrt(min_size*max_size)确定宽高生成一个框(约束,max_size>min_size)。
- 根据aspect_ratio(如定义所示aspect_ratio为2,3,flip是true,自动添加aspect_ratio=1/2、1/3),生成对应的prior box。
因此,num_priors(prior box的数量)= min_size的数量+aspect_ratio的数量(这里为4)*min_size的数量(这里为1)+max_size的数量 (max_size的数量和min_size 的数量一一对应)。
算子定义如下:
- 在LayerParameter中添加PriorBoxParameter
message LayerParameter { ... optional PriorBoxParameter prior_box_param = 203; ... } - 定义PriorBoxParameter类型以及属性参数
message PriorBoxParameter { // Encode/decode type. enum CodeType { CORNER = 1; CENTER_SIZE = 2; CORNER_SIZE = 3; } // Minimum box size (in pixels). Required! repeated float min_size = 1; // Maximum box size (in pixels). Required! repeated float max_size = 2; // Various of aspect ratios. Duplicate ratios will be ignored. // If none is provided, we use default ratio 1. repeated float aspect_ratio = 3; // If true, will flip each aspect ratio. // For example, if there is aspect ratio "r", // we will generate aspect ratio "1.0/r" as well. optional bool flip = 4 [default = true]; // If true, will clip the prior so that it is within [0, 1] optional bool clip = 5 [default = false]; // Variance for adjusting the prior bboxes. repeated float variance = 6; // By default, we calculate img_height, img_width, step_x, step_y based on // bottom[0] (feat) and bottom[1] (img). Unless these values are explicitely // provided. // Explicitly provide the img_size. optional uint32 img_size = 7; // Either img_size or img_h/img_w should be specified; not both. optional uint32 img_h = 8; optional uint32 img_w = 9; // Explicitly provide the step size. optional float step = 10; // Either step or step_h/step_w should be specified; not both. optional float step_h = 11; optional float step_w = 12; // Offset to the top left corner of each cell. optional float offset = 13 [default = 0.5]; }
基于上述原则,PriorBox在prototxt中定义的代码样例如下:
layer {
name: "layer_priorbox"
type: "PriorBox"
bottom: "some_input"
bottom: "some_input"
top: "some_output"
prior_box_param {
min_size: 30.0
max_size: 60.0
aspect_ratio: 2
flip: true
clip: false
variance: 0.1
variance: 0.1
variance: 0.2
variance: 0.2
step: 8
offset: 0.5
}
}SpatialTransformer
该算子计算过程其实做了一个仿射变换:仿射变换的参数,可以是在prototxt固定的,多个batch使用一份;也可以是层的第二个输入,每个batch使用不一样的参数。
计算步骤:
- 对于输出坐标,通过如下公式将其变换成[-1,1]区间中的值。
计算代码如下:
Dtype* data = output_grid.mutable_cpu_data(); for(int i=0; i< output_H_ * output_W_; ++i) { data[3 * i] = (i / output_W_) * 1.0 / output_H_ * 2 - 1; data[3 * i + 1] = (i % output_W_) * 1.0 / output_W_ * 2 - 1; data[3 * i + 2] = 1; } - 通过仿射变换,转换为输入的坐标,其中s为输入坐标,t为输出坐标,计算公式如下:
计算代码如下:
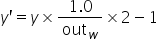
caffe_cpu_gemm<Dtype>(CblasNoTrans, CblasTrans, output_H_ * output_W_, 2, 3, (Dtype)1., output_grid_data, full_theta_data + 6 * i, (Dtype)0., coordinates); - 通过输入坐标取对应位置的值,赋值给输出的对应位置。因为在第一步对输出坐标做了一次转换,所以对应的输入坐标,使用同样的方式再缩放回去,代码样例如下:
Dtype x = (px + 1) / 2 * H; Dtype y = (py + 1) / 2 * W; if(debug) std::cout<<prefix<<"(x, y) = ("<<x<<", "<<y<<")"<<std::endl; for(int m = floor(x); m <= ceil(x); ++m) for(int n = floor(y); n <= ceil(y); ++n) { if(debug) std::cout<<prefix<<"(m, n) = ("<<m<<", "<<n<<")"<<std::endl; if(m >= 0 && m < H && n >= 0 && n < W) { res += (1 - abs(x - m)) * (1 - abs(y - n) * pic[m * W + n]); if(debug) std::cout<<prefix<<" pic[m * W + n]= "<<std::endl; } }
算子定义如下:
- 在LayerParameter中添加SpatialTransformParameter
message LayerParameter { ... optional SpatialTransformParameter spatial_transform_param = 153; ... } - 定义SpatialTransformParameter类型以及属性参数
message SpatialTransformParameter { optional uint32 output_h = 1 [default = 0]; optional uint32 output_w = 2 [default = 0]; optional float border_value = 3 [default = 0]; repeated float affine_transform = 4; enum Engine { DEFAULT = 0; CAFFE = 1; CUDNN = 2; } optional Engine engine = 15 [default = DEFAULT]; }
基于上述原则,SpatialTransform层在prototxt中定义的代码样例如下:
layer {
name: "st_1"
type: "SpatialTransformer"
bottom: "data"
bottom: "theta"
top: "transformed"
st_param {
to_compute_dU: false
theta_1_1: -0.129
theta_1_2: 0.626
theta_2_1: 0.344
theta_2_2: 0.157
}
}