IterateBatch
功能说明
注意:该接口为预留接口,当前版本暂不支持。
单次Matmul计算处理的shape比较小时,由于每次计算均涉及到内部的通信,可能会影响性能,该接口提供批量处理Matmul的功能,调用一次IterateBatch,可以计算出多个singleCoreM * singleCoreN大小的C矩阵。
在使用该接口前,需要了解一些必备的数据排布格式:
- BSH/SBH:B:Batch,批处理的大小; S:sequence length,序列长度;H = N * D,其中,N为head的数量,D为head的大小。
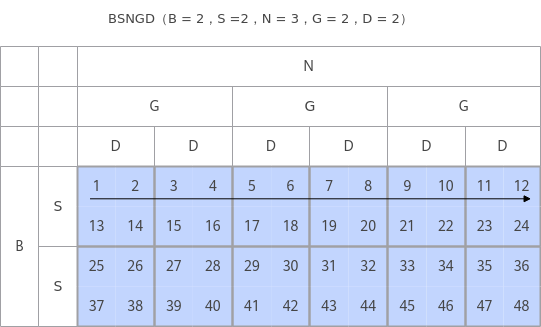
- BSNGD:为原始BSH shape做reshape后的shape,S和D为单Batch的矩阵乘的M轴(或N轴)和K轴,一个SD为一个batch的计算数据,Layout格式如下图所示:
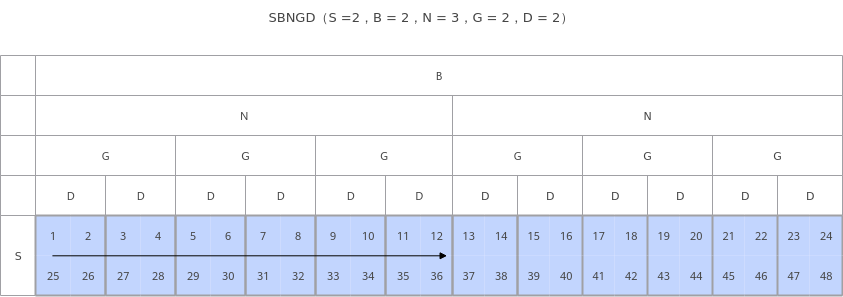
- SBNGD:为原始SBH shape做reshape后shape,S和D为的矩阵乘的M轴(或N轴)和K轴,一个SD为一个batch的计算数据,Layout格式如下图所示:
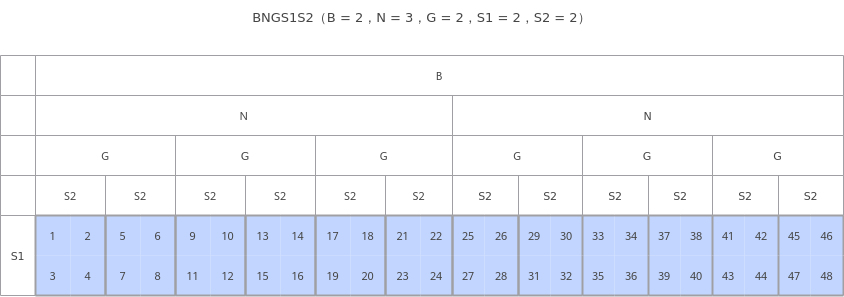
- BNGS1S2:一般为前两种Layout进行矩阵乘的输出,S1S2数据连续存放,一个S1S2为一个batch的计算数据,Layout格式如下图所示:
调用该接口之前需要在host Tiling实现中使用SetALayout、SetBLayout、SetCLayout、SetBatchNum设置A/B/C的Layout轴信息和最大BatchNum数;实例化Matmul时,需要通过MatmulType设置输入输出的Layout格式,当前支持3种Layout类型:BSNGD、SBNGD、BNGS1S2。
单个矩阵乘迭代顺序可通过tiling参数iterateOrder调整。
函数原型
template <bool sync = true>
__aicore__ inline void IterateBatch(const GlobalTensor<DstT>& gm, uint32_t batchA, uint32_t batchB, bool enSequentialWrite, const uint32_t matrixStrideA = 0, const uint32_t matrixStrideB = 0, const uint32_t matrixStrideC = 0)
template <bool sync = true>
__aicore__ inline void IterateBatch(const LocalTensor<DstT>& ubCmatrix, uint32_t batchA, uint32_t batchB, bool enSequentialWrite, const uint32_t matrixStrideA = 0, const uint32_t matrixStrideB = 0, const uint32_t matrixStrideC = 0)
参数说明
参数名 |
描述 |
|---|---|
sync |
获取C矩阵过程分为同步和异步两种模式:
通过该参数设置同步或者异步模式:同步模式设置为true;异步模式设置为false。默认为同步模式。异步场景需要配合WaitIterateBatch接口使用。 Atlas 200I/500 A2推理产品只支持设置为false。 |
参数名 |
输入/输出 |
描述 |
|---|---|---|
gm |
输入 |
C矩阵放置于Global Memory的地址。 Atlas A2训练系列产品/Atlas 800I A2推理产品,支持的数据类型为:half/float/bfloat16_t |
ubCmatrix |
输入 |
C矩阵放置于Local Memory的地址。 Atlas A2训练系列产品/Atlas 800I A2推理产品,支持的数据类型为:half/float/bfloat16_t |
batchA |
输入 |
左矩阵的batch数。 |
batchB |
输入 |
右矩阵的batch数。在batchA/batchB不相同的情况下,默认做broadcast操作。 多batch计算支持在G轴上做输入broadcast和输出reduce,左矩阵、右矩阵G轴维度必须是整数倍的关系。 |
enSequentialWrite |
输入 |
输出是否连续存放数据。
|
matrixStrideA |
输入 |
A矩阵源操作数相邻nd矩阵起始地址间的偏移,单位是元素。 |
matrixStrideB |
输入 |
B矩阵源操作数相邻nd矩阵起始地址间的偏移,单位是元素。 |
matrixStrideC |
输入 |
C矩阵目的操作数相邻nd矩阵起始地址间的偏移,单位是元素。 |
返回值
无
支持的型号
Atlas A2训练系列产品/Atlas 800I A2推理产品
约束说明
- 输入A、B矩阵多Batch数据总和应小于L1 Buffer的大小。
- 如果接口输出到Unified Buffer上,输出C矩阵大小BaseM*BaseN应小于分配的Unified Buffer内存大小。
- 输入输出只支持ND格式数据。
- 该接口不支持量化模式,即不支持SetQuantScalar、SetQuantVector接口。
- BSNGD场景,不支持一次计算多行SD,需要算子程序中循环计算。
- 异步模式不支持IterateBatch搬运到UB上。
调用示例
该示例完成aGM、bGM矩阵乘,结果保存到cGm上,其中aGM数据的layout格式为BSNGD,bGM数据的layout格式为BSNGD,cGM的layout格式为BSNGS1S2,左矩阵每次计算batchA个SD数据,右矩阵每次计算batchB个SD数据。
#include "kernel_operator.h"
#include "lib/matmul_intf.h"
extern "C" __global__ __aicore__ void kernel_matmul_rpc_batch(GM_ADDR aGM, GM_ADDR bGM, GM_ADDR cGM, GM_ADDR biasGM, GM_ADDR tilingGM, GM_ADDR workspaceGM, uint32_t isTransposeAIn, uint32_t isTransposeBIn, int32_t batchA, int32_t batchB)
{
// 定义matmul type
typedef MatmulType <AscendC::TPosition::GM, CubeFormat::ND, half, false, LayoutMode::BSNGD> aType;
typedef MatmulType <AscendC::TPosition::GM, CubeFormat::ND, half, true, LayoutMode::BSNGD> bType;
typedef MatmulType <AscendC::TPosition::GM, CubeFormat::ND, float, false, LayoutMode::BSNGS1S2> cType;
typedef MatmulType <AscendC::TPosition::GM, CubeFormat::ND, float> biasType;
// 初始化tiling数据
TCubeTiling tiling;
auto tempTilingGM = (__gm__ uint32_t*)tilingGM;
auto tempTiling = (uint32_t*)&tiling;
for (int i = 0; i < sizeof(TCubeTiling) / sizeof(int32_t); ++i, ++tempTilingGM, ++tempTiling) {
*tempTiling = *tempTilingGM;
}
// 初始化gm数据
GlobalTensor<half> aGlobal;
GlobalTensor<half> bGlobal;
GlobalTensor<float> cGlobal;
GlobalTensor<float> biasGlobal;
int32_t sizeA = tiling.ALayoutInfoB * tiling.ALayoutInfoS * tiling.ALayoutInfoN * tiling.ALayoutInfoG * tiling.ALayoutInfoD * sizeof(half);
int32_t sizeB = tiling.BLayoutInfoB * tiling.BLayoutInfoS * tiling.BLayoutInfoN * tiling.BLayoutInfoG * tiling.BLayoutInfoD * sizeof(half);
int32_t sizeC = tiling.CLayoutInfoB * tiling.CLayoutInfoS1 * tiling.CLayoutInfoN * tiling.CLayoutInfoG * tiling.CLayoutInfoS2 * sizeof(float);
int32_t sizebias = tiling.CLayoutInfoB * tiling.CLayoutInfoN * tiling.CLayoutInfoG * tiling.CLayoutInfoS2 * sizeof(float);
aGlobal.SetGlobalBuffer(reinterpret_cast<__gm__ half*>(aGM), sizeA);
bGlobal.SetGlobalBuffer(reinterpret_cast<__gm__ half*>(bGM), sizeB);
cGlobal.SetGlobalBuffer(reinterpret_cast<__gm__ float*>(cGM), sizeC);
biasGlobal.SetGlobalBuffer(reinterpret_cast<__gm__ float*>(biasGM), sizebias);
tiling.shareMode = 0;
tiling.shareL1Size = 512 * 1024;
tiling.shareL0CSize = 128 * 1024;
tiling.shareUbSize = 0;
int offset_a=0, offset_b=0, offset_c=0, offset_bias=0;
GlobalTensor<A_T> gm_a;
gm_a.SetGlobalBuffer(const_cast<__gm__ half*>(aGlobal[offset_a].GetPhyAddr()), tiling.ALayoutInfoS * tiling.ALayoutInfoN * tiling.ALayoutInfoG * tiling.ALayoutInfoD);
GlobalTensor<B_T> gm_b;
gm_b.SetGlobalBuffer(const_cast<__gm__ half*>(bGlobal[offset_b].GetPhyAddr()), tiling.BLayoutInfoS * tiling.BLayoutInfoN * tiling.BLayoutInfoG * tiling.BLayoutInfoD);
GlobalTensor<C_T> gm_c;
gm_c.SetGlobalBuffer(const_cast<__gm__ float*>(cGlobal[offset_c].GetPhyAddr()), tiling.CLayoutInfoS1 * tiling.CLayoutInfoN * tiling.CLayoutInfoG * tiling.CLayoutInfoS2) ;
GlobalTensor<BiasT> gm_bias;
gm_bias.SetGlobalBuffer(const_cast<__gm__ float*>(biasGlobal[offset_bias].GetPhyAddr()), tiling.CLayoutInfoN * tiling.CLayoutInfoG * tiling.CLayoutInfoS2);
// 创建Matmul实例
Matmul<aType, bType, cType, biasType> mm1;
TPipe pipe;
g_cubeTPipePtr = &pipe;
SetSysWorkspace(workspaceGM);
REGIST_MATMUL_OBJ(&pipe, GetSysWorkSpacePtr(), mm1);
mm1.Init(&tiling);
int batchC = batchA > batchB ? batchA : batchB;
int g_lay = tiling.ALayoutInfoG > tiling.BLayoutInfoG ? tiling.ALayoutInfoG : tiling.BLayoutInfoG;
// 计算需要多Batch计算循环次数
int for_exent = tiling.ALayoutInfoB * tiling.ALayoutInfoN * g_lay / tiling.BatchNum;
for(int i=0; i<for_exent; ++i) {
// 计算每次多batch计算A/B矩阵的起始地址
int batchOffsetA = i * tiling.ALayoutInfoD * batchA;
int batchOffsetB = i * tiling.BLayoutInfoD * batchB;
mm1.SetTensorA(gm_a[batchOffsetA], isTransposeAIn);
mm1.SetTensorB(gm_b[batchOffsetB], isTransposeBIn);
int idx_c = i * batchC;
if (tiling.CLayoutInfoG == 1 && (tiling.BLayoutInfoG != 1 || tiling.ALayoutInfoG != 1)) {
idx_c = idx_c / (tiling.BLayoutInfoG > tiling.ALayoutInfoG ? tiling.BLayoutInfoG : tiling.ALayoutInfoG);
}
if(tiling.isBias) {
int batchOffsetBias = idx_c * tiling.CLayoutInfoS2;
mm1.SetBias(gm_bias[batchOffsetBias]);
}
int batchOffsetC = idx_c * tiling.CLayoutInfoS2;
if (C_TYPE::layout == LayoutMode::BNGS1S2) {
batchOffsetC = idx_c * tiling.CLayoutInfoS2 * tiling.CLayoutInfoS1;
}
// 多batch Matmul计算
mm1.IterateBatch(gm_c[batchOffsetC], batchA, batchB, false);
}
}