驱动源码编译
简介
发布包中提供了驱动源码包{soc version}-driver-{software version}-minios.aarch64-src.tar.gz,用户可自行根据需要进行驱动的定制或配置文件的修改。若用户对驱动源码包中的任何文件进行了定制修改,定制完成后,都需要参考本章节进行源码编译;若未对驱动源码包中的文件进行任何修改,则此章节可跳过。
源码编译依赖于HCC编译器,HCC编译器存在于Toolkit安装包的toolchain目录下。
操作步骤
- 执行以下命令切换到root用户,后续操作都需要以root用户执行。
su - root
- 解压软件包获取中的驱动源码包{soc version}-driver-{software version}-minios.aarch64-src.tar.gz。
例如在/usr/local/software/目录下执行如下解压命令:
tar -zxvf {soc version}-driver-{software version}-minios.aarch64-src.tar.gz
若已执行过此操作,此步骤可跳过。
- 进入驱动源码包解压后的driver目录,例如/usr/local/software/driver。
- 关闭内核模块(KO)签名功能。
Device操作系统内核模块默认开启了签名功能,若用户自定义驱动源码,需要关闭内核模块的签名功能,操作步骤如下:
- 进入/usr/local/software/driver/kernel/linux-5.10目录。
cd /usr/local/software/driver/source/kernel/linux-5.10
- 执行如下命令生成.config文件。
make ARCH=arm64 CROSS_COMPILE=${INSTALL_DIR}/toolkit/toolchain/hcc/bin/aarch64-target-linux-gnu- eulerosv2r9_defconfig
- 修改内核配置选项。
- 执行如下命令,弹出内核配置界面。
make ARCH=arm64 CROSS_COMPILE=${INSTALL_DIR}/toolkit/toolchain/hcc/bin/aarch64-target-linux-gnu- menuconfig
- ${INSTALL_DIR}请替换为CANN软件安装后文件存储路径。
- 此命令依赖ncurses-devel,可使用如下命令进行安装:yum install -y ncurses-devel 或者 apt-get install libncurses5-dev
说明:请根据实际操作系统版本选择依赖的安装命令,如果执行命令时提示缺少其他依赖,请根据提示自行安装。
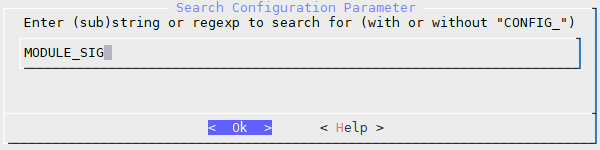
- 在配置界面中输入“/”,进入搜索界面,搜索“MODULE_SIG”。
- 选择“Ok”,进入搜索结果界面,在搜索结果界面中按数字键“1”跳转到CONFIG选项。
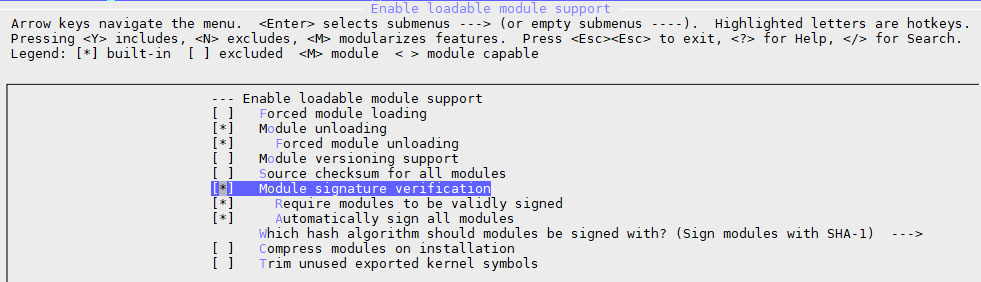
按空格键关闭内核模块校验选项,[ ]里面存在“*”表示打开,[ ]空白表示关闭,关闭后示例如下所示:
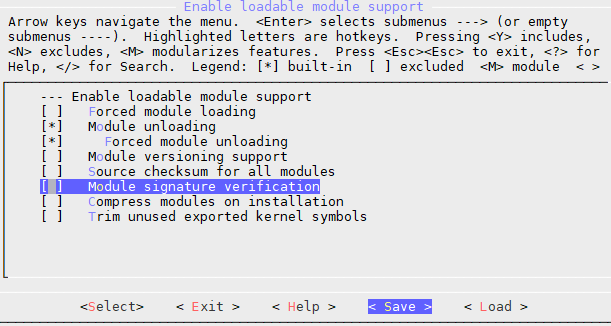
- 选择“Save”保存,进入配置文件名称界面,如下所示。
请注意,需要保持默认文件名“.config”,然后选择“Ok”。
- 连续选择“Exit”,退出内核配置界面。
- 执行如下命令,弹出内核配置界面。
- 替换“.config”文件。
- 执行如下命令重新编译生成内核镜像。
make ARCH=arm64 CROSS_COMPILE=${INSTALL_DIR}/toolkit/toolchain/hcc/bin/aarch64-target-linux-gnu- Image
${INSTALL_DIR}请替换为CANN软件安装后文件存储路径。
在弹出的回显信息中默认输入“y”,命令执行完成后,会在“kernel/linux-5.10/arch/arm64/boot”目录下生成内核镜像文件“Image”。
提升编译内核镜像效率的方法如下:
内核镜像编译支持-j[N]参数指定编译CPU核数,N表示使用N个CPU并发编译,不指定则使用1个cpu编译内核。N参数应根据实际编译环境CPU个数配置(可执行“cat /proc/cpuinfo | grep processor | wc -l”命令查看),比如编译环境有32个CPU,则可以使用20个CPU编译,命令示例如下所示:
make ARCH=arm64 CROSS_COMPILE=${INSTALL_DIR}/toolkit/toolchain/hcc/bin/aarch64-target-linux-gnu- Image -j20
- 为重新生成的内核镜像增加签名头。
cd arch/arm64/boot/
执行如下两条命令为内核镜像文件增加签名头:
python3.7 /usr/local/software/driver/source/vendor/hisi/tools/signtool/image_pack/esbc_header.py -raw_img Image -out_img header-Ascend310P.image -version 1.1.1.1.1 -nvcnt 0 -tag uimage -platform hi1910p
python3.7 /usr/local/software/driver/source/vendor/hisi/tools/signtool/image_pack/image_pack.py -raw_img header-Ascend310P.image -out_img Ascend310P.image -D -platform hi1910p
- /usr/local/software/为2中{soc version}-driver-{software version}-minios.aarch64-src.tar.gz解压目录。
- -raw_img:原始镜像文件路径,保持与示例一致即可。
- -out_img:重新打包后的镜像文件输出路径,保持与示例一致即可。
- -version:镜像版本号,格式为x.x.x.x.x用户可自定义。
- 其他参数请保持默认值即可。
命令执行完成后,会在“kernel/linux-5.10/arch/arm64/boot”目录下生成增加签名头后的文件系统镜像文件Ascend310P.image。
- 替换Driver安装目录下device文件夹下的的Ascend310P.image。

替换前请先备份 /usr/local/Ascend/driver/device/目录下的Ascend310P.image文件到其他目录,防止内核镜像编译出错。
- 删除编译生成文件,为后续编译驱动源码做准备。
cd /usr/local/software/driver/source/kernel/linux-5.10
make mrproper
- 进入/usr/local/software/driver/kernel/linux-5.10目录。
- 在解压后的/usr/local/software/driver下的source目录,安装相关依赖并进行源码编译。
- 进入驱动源码目录。
- 编译驱动。
make driver_device product=mini CROSS_COMPILE=${INSTALL_DIR}/toolkit/toolchain/hcc/bin/aarch64-target-linux-gnu- KERNEL_DIR=/usr/local/software/driver/source/kernel/linux-5.10 KERNEL_DEFCONFIG=/usr/local/software/driver/source/kernel/linux-5.10/arch/arm64/configs/eulerosv2r9_defconfig build_device=true
- CROSS_COMPILE:为HCC交叉编译器所在目录,其中${INSTALL_DIR}为CANN软件安装后文件存储路径,请根据实际路径替换。
- KERNEL_DIR与 KERNEL_DEFCONFIG:/usr/local/software/为驱动源码包所在目录。
- 其他请保持不变。
命令执行成功后,会在source目录的out/device/文件夹下生成如下表所示的内核对象文件。
表1 内核对象文件列表 内核对象
描述
ascend_event_sched.ko
事件调度,提供TS、DVPP等事件与AI CPU间的调度。
ascend_queue.ko
提供统一的队列管理功能,实现进程间数据传递免拷贝,从而提升进程间通信效率。
drv_base.ko
DVPP系统基础模块,提供内存管理等功能。
drv_chnl.ko
任务调度器模块,为VENC模块的驱动源。
drv_devdrv.ko
设备驱动模块,涉及驱动与TS模块交互,驱动将上层下发下来的计算任务传递给TS模块,由TS模块进行调度计算。
drv_devmm.ko
内存管理模块,设备侧的内存申请释放等功能的实现。
drv_devmng.ko
设备管理模块,提供获取设备信息、设置设备配置等管理类功能。
drv_dfm.ko
提供黑匣子异常注册功能,上报接口给其他内核调用。
drv_h264e.ko
H.264协议处理模块,是对图像按照H.264协议进行编码处理的模块。
drv_h265e.ko
H.265协议处理模块,是对图像按照H.265协议进行编码处理的模块。
drv_icm.ko
通信模块,实现IPC核间通信的协议层,将消息协议和硬件解耦。
drv_jpegd.ko
图片解码模块,提供jpeg图像解码功能。
drv_jpege.ko
图片编码模块,提供图像编码功能。
drv_log.ko
日志模块,提供日志采集功能,将日志传到host侧。
drv_memory.ko
提供片上内存信息查询及故障上报功能。
drv_osal.ko
DVPP系统基础模块,操作系统抽象层。
drv_pcie_hdc.ko
提供统一、高效的Host与Device通信功能。对外提供类似Socket的接口,如Send/Recv/Close等,内部利用DMA,实现快速的内存搬移。
drv_pcie.ko
提供PCIe通讯功能,设备PCIe初始化,执行镜像搬移流程,提供PCIe消息功能和DMA功能给其他模块使用。
drv_pcie_vnic.ko
提供虚拟网口功能,用户可通过标准ssh流程访问设备。
drv_pkicms.ko
签名校验模块,提供SOC(Security Operations Center )签名校验等功能。
drv_platform.ko
平台模块。
drv_pm.ko
低功耗模块,提供睡眠唤醒功能。
drv_prof.ko
数据采集模块,提供数据采集通道。
drv_pwm.ko
为脉冲宽度调制(Pulse Width Modulation)模块提供驱动程序。
drv_rc.ko
码率控制模块,实现对编码码率进行控制。
drv_soc_misc.ko
提供片上信息查询及故障上报功能。
drv_soft_fault.ko
提供软件故障及用户态故障上报功能。
drv_spi.ko
master控制器驱动,控制spi master。
drv_spi_slave.ko
为SPI模块提供驱动程序。
drv_sys.ko
DVPP系统基础模块,提供DVPP系统初始化功能。
drv_ts.ko
Task Schedule与AI CPU交互事件的mailbox通道和datadump通道。
drv_upgrade.ko
升级模块,提供升级内核态功能。
drv_user_cfg.ko
用于进行flash用户配置区管理,主要flash对用户配置区进行读取、配置、清除操作。
drv_vdec.ko
视频解码模块,提供解码器的通道管理,参数设置,码流接收等功能。
drv_vedu.ko
硬件配置模块,主要任务为根据软件配置进行逻辑处理。
drv_venc.ko
编码通道模块,为编码模块与外部的交互模块。
drv_vfmw.ko
视频解码模块,提供解码器的码流切割,语法解析,配置硬件解码等功能。
drv_vpc.ko
图像预处理模块,提供图像处理Core初始化、寄存器配置等功能。
hsm_firmware_update.ko
固件安全升级模块,提供固件安全升级等功能。
hsm_flash.ko
提供Flash读取能力。
hsm_heartbeat.ko
HSM子系统状态查询模块,提供HSM状态查询、PG信息查询等功能。
ipc_drv.ko
IPC通信模块,IPC消息发送接收等。
kbox_init.ko
抓取内核异常信息日志的模块,依赖kbox.ko。
kbox.ko
为kbox提供日志接口,并管理已存储的日志。
mntn_bbox.ko
提供黑匣子相关功能。
retr.ko
特征检索驱动,实现在千亿级规模的目标库中,秒级检索特征相似度高的目标。
trs_tsmng.ko
管理Device侧Control CPU与Task Schedule之间的IPC通信。
tzdriver.ko
提供teeos与normal world的交互功能。
vpc.ko
图像预处理模块,提供图像处理Core调度、队列管理等功能。
说明:
以上内核对象的源码都在driver/source/目录下。在driver/source/目录下通过grep -r xx.ko命令,通过对应的module.mk文件,找到源码所在的文件夹,如下所示:

则drv_pcie_hdc.ko对应的源码文件夹为drivers/ai_sdk/arc/linux/kernel_space/src/drv_pcie_device/pcie_slave。
- 替换文件系统中的相关内核对象文件。
拷贝编译生成的*.ko到解压后的文件系统的var目录下。
cd /usr/local/software/driver/source/out/device
cp -rf *.ko /usr/local/filesys_modify/tempdir/var/
异常处理
若进行源码编译时,一直循环提示类似如下信息:

请检查当前系统时间是否早于source/kernel/linux-5.10/scripts下的文件创建时间,若是,则请更改当前系统时间,然后重新进行编译操作。