Scope融合实现方案
Scope融合实现方案包括Scope融合规则注册、Scope融合规则创建和执行。
Scope融合实现方案
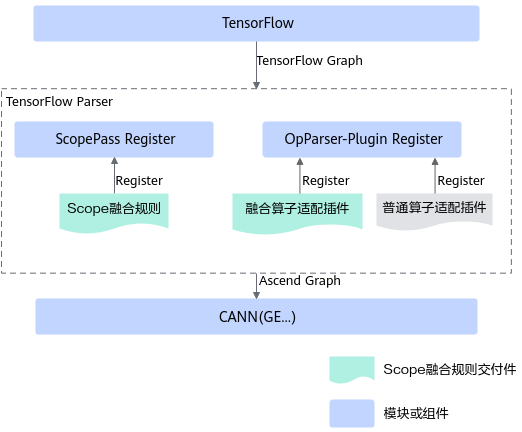
- ScopePass Register:用于融合规则注册。
- OpParser-Plugin Register:用于融合算子Parser注册,将Scope内的TensorFlow算子映射成适配昇腾AI处理器的融合算子。普通算子映射也是由该模块完成。
Scope融合规则注册
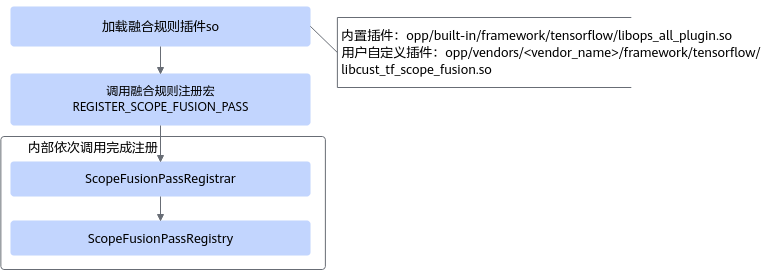
在ATC模型转换或者在TensorFlow框架内执行图时,系统会将“Ascend-cann-toolkit安装目录/ascend-toolkit/latest/opp/built-in/framework/”下的融合规则插件so(包括所有内置融合规则和自定义融合规则)自动加载到ScopePass Register。在后续Parser执行阶段可根据该融合规则的使能状态,决定是否创建并执行。
图1 Scope融合规则注册机制
Scope融合规则创建和执行
图2 Scope融合规则执行流程
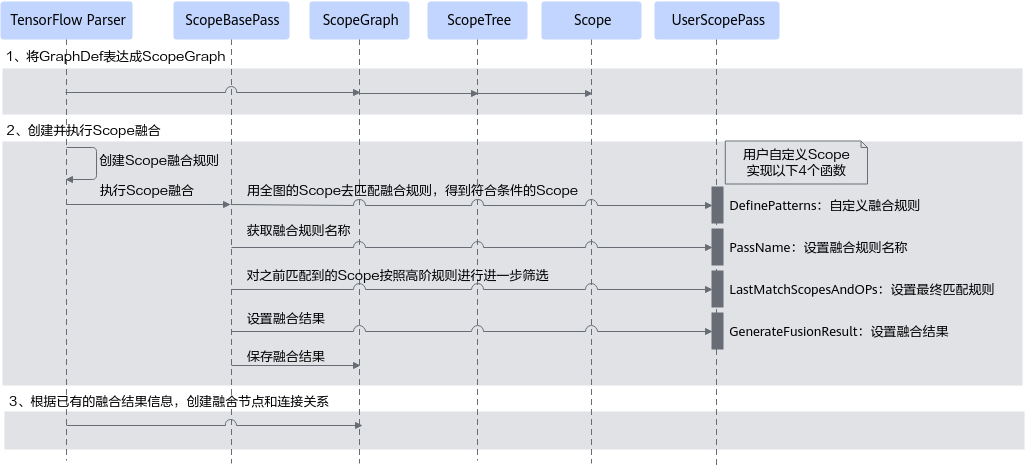
- TensorFlow Parser在模型解析过程中, 调用ScopePassManager提供的能力, 将GraphDef里的Node信息、Scope信息用Scope融合的数据类型表示出来,从上到下的层级为ScopeGraph、ScopeTree、Scope,生成ScopeGraph。
- TensorFlow Parser创建并执行Scope融合,最后将最终匹配结果保存到ScopeGraph。主要包括以下几步:
- TensorFlow Parser根据已注册的融合规则的使能状态,创建Scope融合规则。
- 获取已创建的Scope融合规则,用全图的Scope,按照融合规则注册的先后顺序,逐一去匹配这些规则,如果匹配到则设置对应Scope的类型。
如果用户自定义融合规则的名称和内置融合规则名称一样,则按照用户自定义融合规则匹配。
- 对上一步匹配到的Scope按Scope的连接关系等进行进一步筛选。例如上一步得到的Scope并不一定是最终目标融合的Scope,而需要筛选出有并列关系的Scope,或者筛选出有嵌套关系的Scope等。
- 对最终匹配到的Scope设置融合结果, 包含融合节点的名字、类型、输入、输出、描述等。
- 将融合结果保存到第1步生成的ScopeGraph中。
- TensorFlow Parser后续流程会根据融合结果信息,执行添加节点、连接节点关系、构造IR Graph等操作。
关键数据结构
ScopeGraph、ScopeTree等数据结构提供了Scope融合所需的各种能力和数据保存功能,接口定义请参见Scope融合规则开发接口,关键类的作用简介请参考表1。
类名 |
作用简介 |
参考文档 |
|---|---|---|
Scope |
Scope类型和属性定义。 |
|
ScopeTree |
存储所有Scope信息的一个树结构,可以查询Scope相关的子Scope和Node信息。 |
|
ScopeGraph |
包含ScopeTree,同时定义了Scope关系匹配计算的成员函数,以及Scope融合识别的最终结果。 |
|
ScopePattern |
Scope匹配规则,目前主要包括以下三种:
|
|
ScopeBaseFeature |
以上三种匹配规则的基类,定义三种匹配规则的基本操作。 |
|
ScopeBasePass |
用户自定义融合规则的基类,提供接口定义、通用执行流程、与通用规则匹配流程的实现。 |
|
ScopesResult |
用于保存经过进一步匹配和筛选后最终留下来的Scope。 |
|
FusionScopesResult |
保存融合结果, 包括设置融合算子名称、类型、输入、输出、描述、内部算子组合信息(多对多场景)等。 |
|
ScopeUtil |
提供通用工具类函数。 |
|
ScopeAttrValue |
父主题: 基本概念