组装步骤
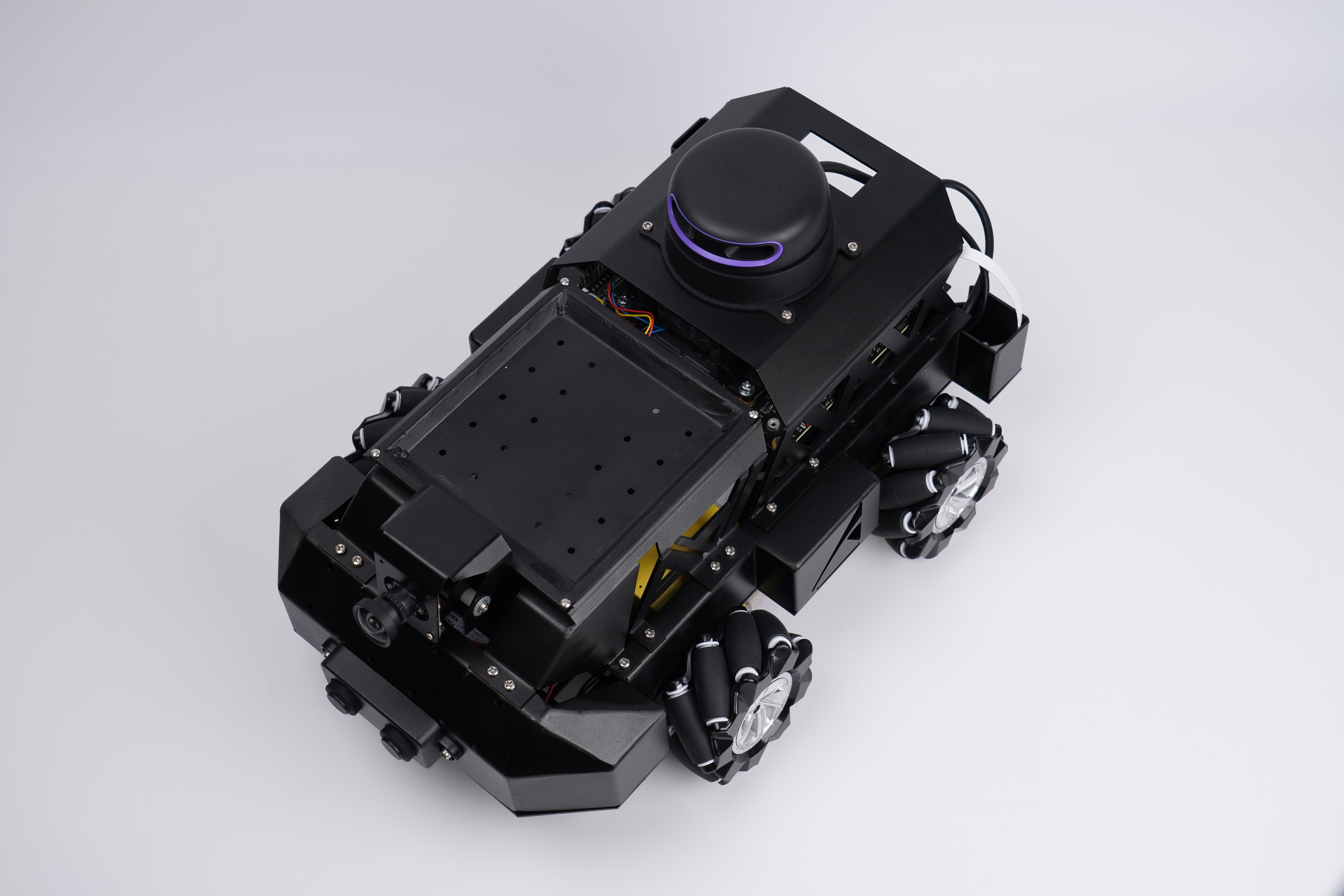
依照从下至上的顺序组装小车,组装底盘上的连接件,按照“电池 > TT直流电机 > 麦克纳姆轮 > 广角摄像头模块 >ESP32单片机 > 第一层外壳 > 超声波模块 > 语音麦克风阵列 > Atlas 200I DK A2开发者套件 > 激光雷达连接到后段外壳 > 前中段外壳顺”序组装,实物图如图1所示。
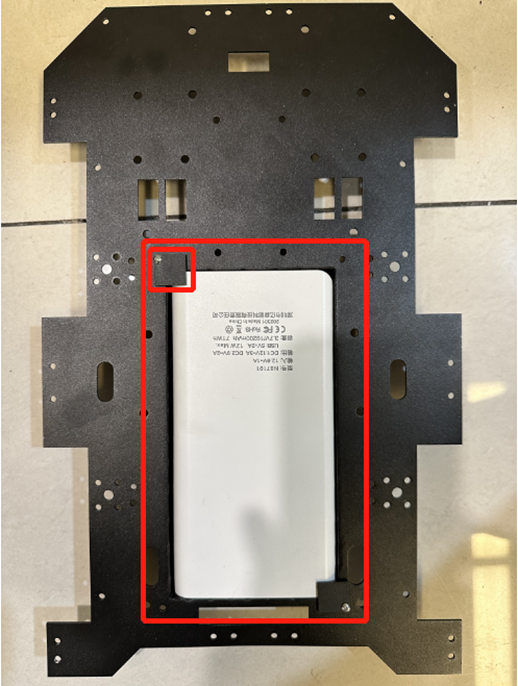
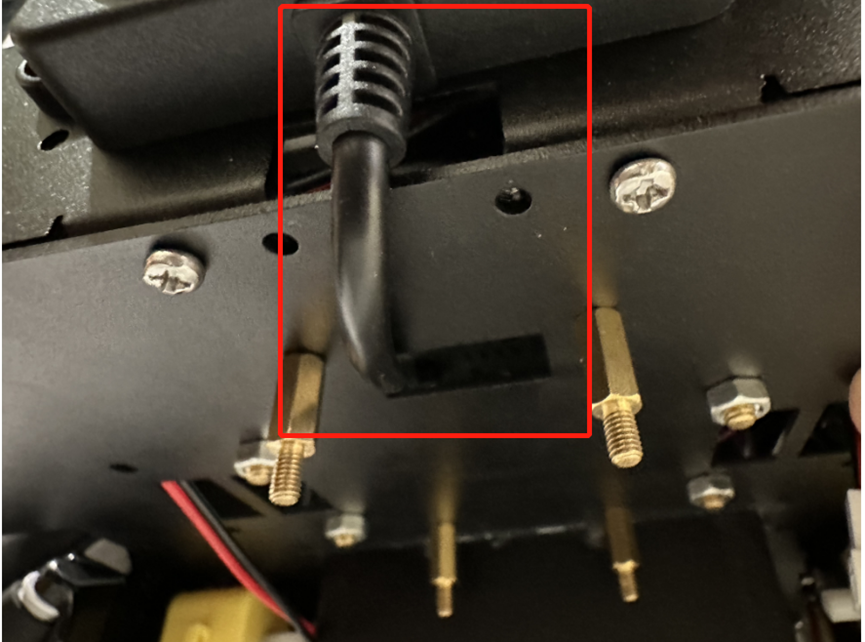
- 准备3D打印或铝合金加工的小车底盘,并确定好对应的开孔与位置和设计图中相同,并安装电源,直接将电池放到电池槽里即可,电池槽后方的矩形空洞可用于将全部电源线埋藏在小车内部。如图2所示。
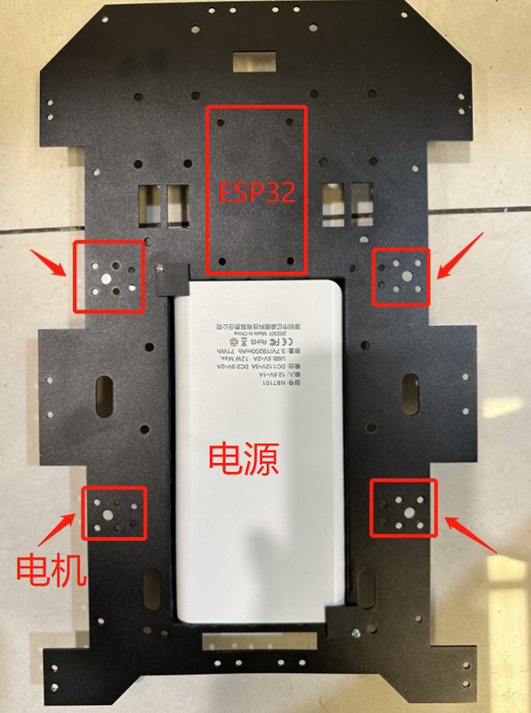
- 将4个TT减速电机安装在如图3中所示的“电机”位置。
TT减速电机主体与固定架安装请参见减速机安装说明书。
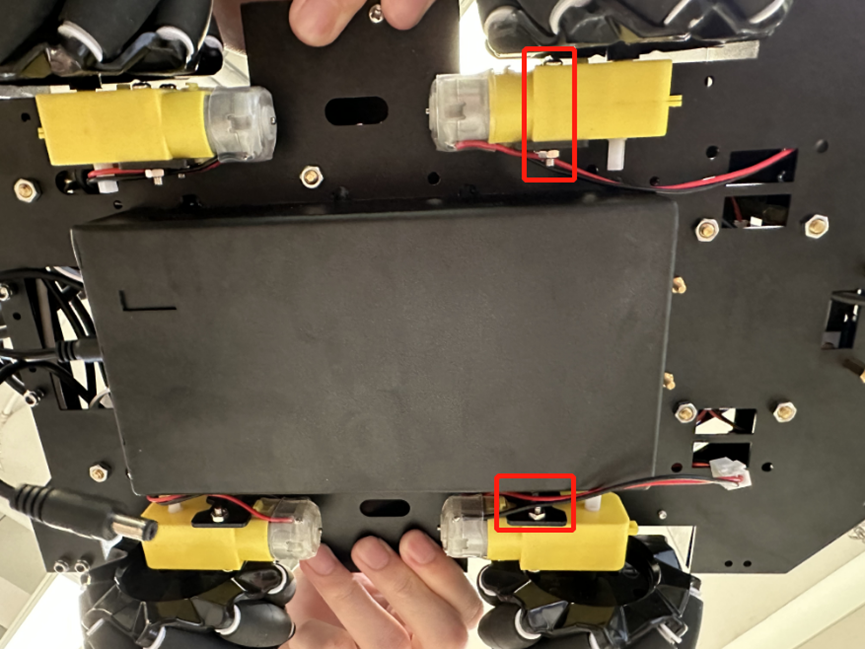
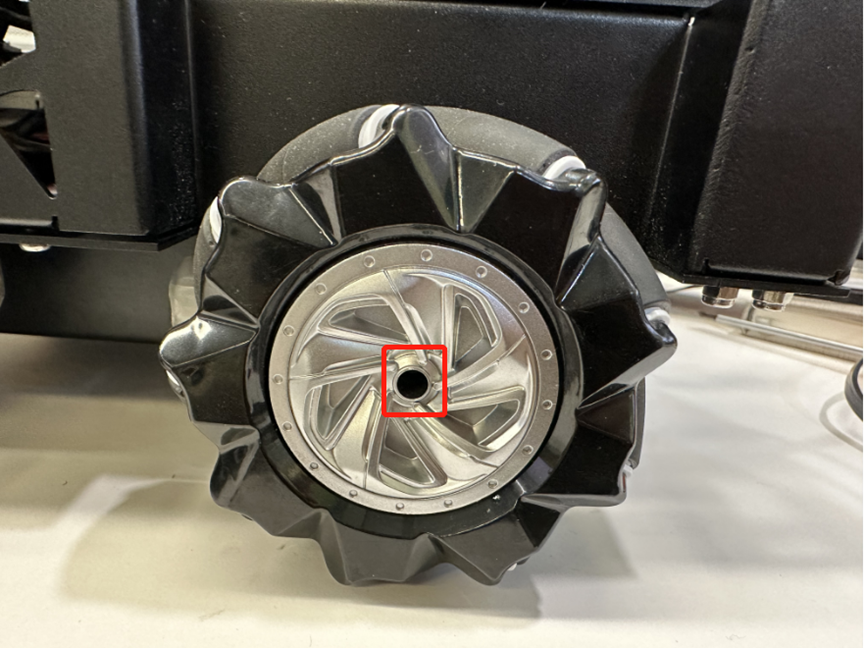
- 安装麦克纳姆轮,利用TT减速电机自带的黑色或银色固定架固定好四个电机后,即可安装四个麦克纳姆轮。如图4和图5所示,对准轮子中心位置拧入自攻螺丝并对准TT电机的白色传动轴,拧紧即可完成电机和车轮的固定。
图中底盘靠近车头部分的四个矩形孔洞为预留出的电机走线口,需使用XH2.542pin线连接到ESP32单片机。
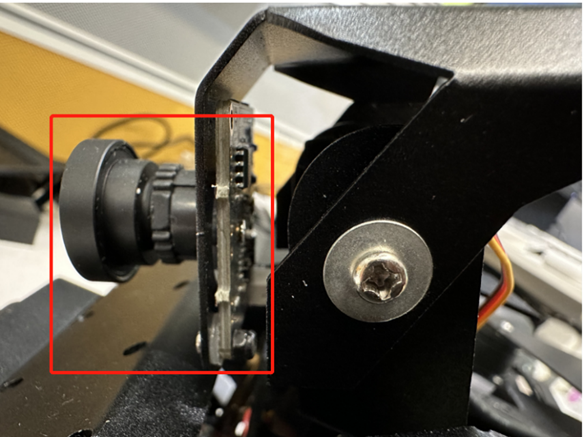
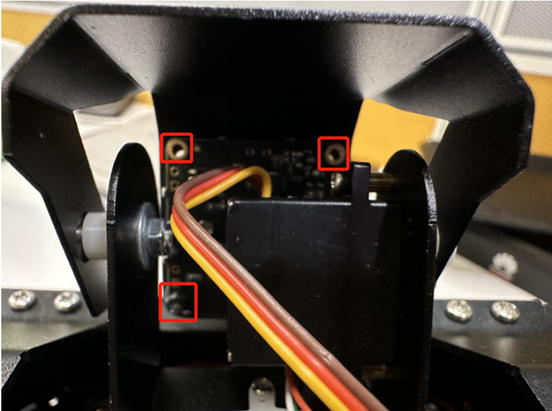
- 将云台的自带摄像头拆下,替换为118度广角摄像头模组,并拧入固定螺丝和防松螺母,如图6和图7所示。
- 安装ESP32单片机。
- 安装超声波模块/语音模块。
- 将超声波模块/语音模块固定至第一层外壳,如图9所示,红框中部分的矩形孔洞为超声波模块的走线口,上方的12个孔洞为预留出语音麦克风与扬声器模块固定孔。
- 将超声波模块的PWM接口连接4根杜邦线之后连接到ESP32,具体四个PWM接头信息参照超声波模块购买链接中的参数说明与ESP32的引脚说明,对应连接即可,底盘的矩形孔洞是预留的超声波模块走线口,如图10所示。
- 将第一层外壳固定在小车底盘。
在底盘上留有多个固定孔位,根据外壳制作工艺不同,固定孔的精确度会有较大区别,所以预留较多孔位,实际组装时固定其中的半数位置即可,同时也方便拆卸。如果外壳使用铝合金钣金加工,且并未开模制造,固定孔位置会与三维模型有较大精度差,需要适当弯折板材固定。
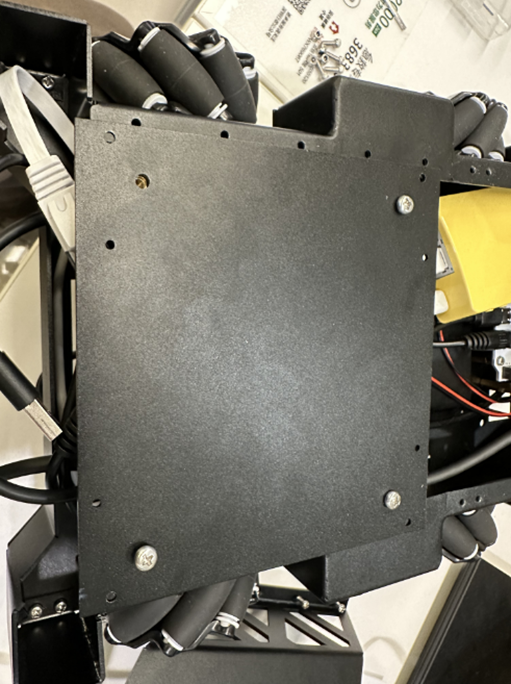
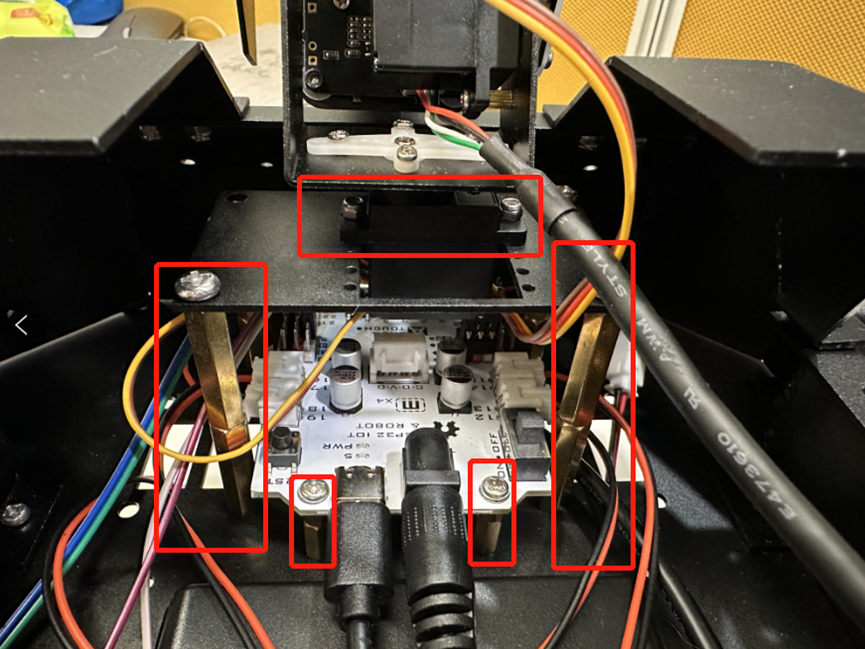
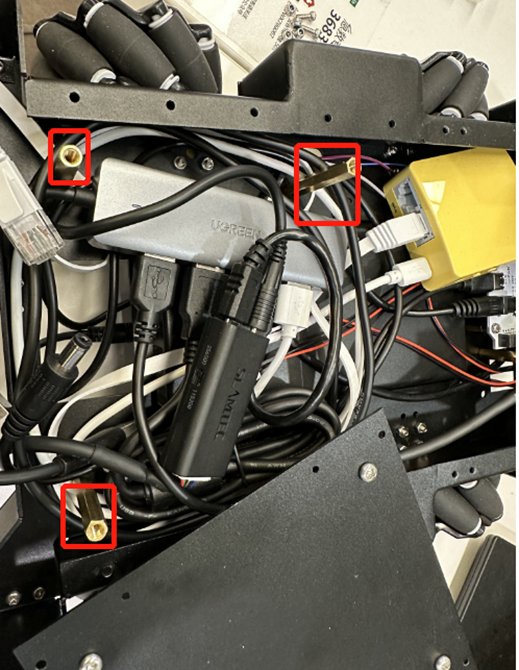
- 在小车后部电池两侧的四个位置固定四个铜柱,如图11所示。
- 使用一根TypeC-USB线连接ESP32和开发者套件,TypeC端插入ESP32单片机,USB端插入开发者套件USB接口。
- 将无线路由器放入小车内部,将网线插入LAN口,再将电源线插入无线路由器电源接口。
- ESP电源线连接ESP32和电源的9V输出口。
- 将USB扩展板放入小车内部,四个USB接口中任意两个连接无线路由器电源线和广角摄像头USB接口,另外两个接口预留给激光雷达及语音控制模块。
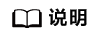
- 将以上模组的连接线收纳在承载板下方的空间,安装开发者套件承载板,并在承载板上安装开发者套件(参考Atlas 200I DK A2 开发者套件《快速开始》“一键制卡”章节烧录镜像,将SD卡插入开发者套件的卡槽)。
图12 安装开发者套件承载板
- 将开发者套件板按照对应螺丝孔位置固定到承载板上,并且将USB扩展板与ESP32连接到开发者套件USB口上,无线路由器的网线连接到开发者套件的eth0网口,再将电源线连接开发者套件和电源12V输出口即可。
- 将小车的前中后段外壳按照下图中的固定孔位固定在外壳上后即可。


父主题: 样例组装