功能
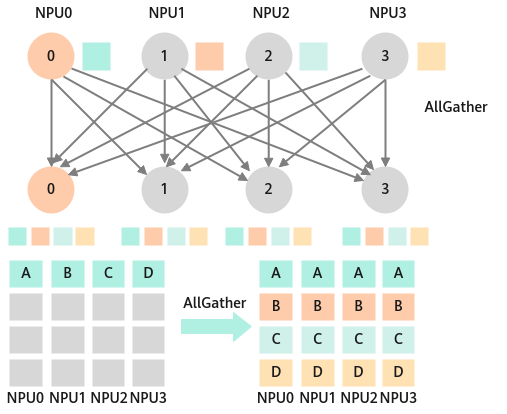
将多个通信卡上的数据按所属rank号的顺序在第一维进行聚合,然后发送到每张卡上。
该算子涉及多卡相关操作,可根据实际需求配置HCCL相关环境变量,具体请参见《CANN 环境变量参考》中的“集合通信”章节。
使用场景
多对多。收集所有的数据到所有的节点上。把多个节点的数据收集到一个主节点上(Gather),再把这个收集到的数据分发到其他节点上(broadcast)。
应用场景:
- All-Gather可应用于模型并行。
- 模型并行里前向计算里的参数全同步,需要用all-gather把模型并行里将切分到不同的NPU上的参数全同步到一张NPU上才能进行前向计算。
使用示例
定义
1 2 3 4 5 6 7 8 9 10 11 |
struct AllGatherParam { int rank = 0; int rankSize = 0; int rankRoot = 0; std::string backend = "hccl"; HcclComm hcclComm = nullptr; CommMode commMode = COMM_MULTI_PROCESS; std::string rankTableFile; std::string commDomain; uint8_t rsv[64] = {0}; }; |
参数列表
|
成员名称 |
类型 |
默认值 |
描述 |
|---|---|---|---|
|
rank |
int |
0 |
当前卡所属通信编号。 |
|
rankSize |
int |
0 |
通信的卡的数量。 |
|
rankRoot |
int |
0 |
主通信编号。 |
|
backend |
string |
“hccl” |
通信后端指示,仅支持“hccl”和“lccl”。 当“backend”为“lccl”且机器为 |
|
hcclComm |
HcclComm |
nullptr |
HCCL通信域指针。 默认为空,加速库为用户创建;若用户想要自己管理通信域,则需要传入该通信域指针,加速库使用传入的通信域指针来执行通信算子。 |
|
commMode |
CommMode |
COMM_MULTI_PROCESS |
通信模式,CommMode类型枚举值。hccl多线程只支持外部传入通信域方式。 |
|
rankTableFile |
string |
- |
集群信息的配置文件路径,适用单机以及多机通信场景,当前仅支持hccl后端场景。 若单机配置了ranktable,则以ranktable来初始化通信域。 配置请参见《TensorFlow 1.15模型迁移指南》的“模型训练>执行分布式训练>准备ranktable资源配置文件”章节。 |
|
commDomain |
string |
- |
通信device组用通信域名标识,多通信域时使用。当backend为lccl时,commMode为多进程时,commDomain需要设置0-63。 |
|
rsv[64] |
uint8_t |
{0} |
预留参数。 |
输入
|
参数 |
维度 |
数据类型 |
格式 |
描述 |
|---|---|---|---|---|
|
x |
[dim_0, dim_1, ..., dim_n] |
|
ND |
输入tensor,维度小于8。 |
输出
|
参数 |
维度 |
数据类型 |
格式 |
描述 |
|---|---|---|---|---|
|
output |
[rankSize, dim_0,dim_1,... ,dim_n] |
|
ND |
输出tensor,维度小于或等于8。 输出output的维数比输入x的维数多一维。 |
规格约束
- rank、rankSize、rankRoot需满足以下条件。
- 0 ≤ rank < rankSize
- 0 ≤ rankRoot < rankSize
- 多用户使用时需要使用ATB_SHARE_MEMORY_NAME_SUFFIX环境变量(请参见Transformer加速库环境变量说明)进行共享内存的区分,以进行初始化信息同步。
- 当使用加速库的通信算子异常退出时,需要清空残留数据,避免影响之后的使用,命令参考如下:
rm -rf /dev/shm/sem.lccl* rm -rf /dev/shm/sem.hccl* ipcrm -a
- 当前不支持单device上跑多个HCCP进程实例,不能单卡同时跑多个通信算子。比如运行通信算子场景下,不支持同一张卡上跑多个模型。
算子调用示例(C++)
前置条件和编译命令请参见算子调用示例。
场景:基础场景。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 |
#include <acl/acl.h> #include <atb/atb_infer.h> #include <iostream> #include <unistd.h> #include <sys/wait.h> #include "demo_util.h" void ExecuteImpl(atb::Operation *op, atb::VariantPack variantPack, atb::Context *context) { uint64_t workspaceSize = 0; CHECK_STATUS(op->Setup(variantPack, workspaceSize, context)); void *workspace = nullptr; if (workspaceSize > 0) { CHECK_STATUS(aclrtMalloc(&workspace, workspaceSize, ACL_MEM_MALLOC_HUGE_FIRST)); } CHECK_STATUS(op->Execute(variantPack, (uint8_t *)workspace, workspaceSize, context)); if (workspace) { CHECK_STATUS(aclrtFree(workspace)); // 销毁workspace } } void AllGatherSample(int rank, int rankSize) { int ret = aclInit(nullptr); // 设置每个进程对应的deviceId int deviceId = rank; CHECK_STATUS(aclrtSetDevice(deviceId)); atb::Context *context = nullptr; CHECK_STATUS(atb::CreateContext(&context)); aclrtStream stream = nullptr; CHECK_STATUS(aclrtCreateStream(&stream)); context->SetExecuteStream(stream); atb::Tensor input; input.desc.dtype = ACL_FLOAT16; input.desc.format = ACL_FORMAT_ND; input.desc.shape.dimNum = 2; input.desc.shape.dims[0] = 3; input.desc.shape.dims[1] = 5; input.dataSize = atb::Utils::GetTensorSize(input); CHECK_STATUS(aclrtMalloc(&input.deviceData, input.dataSize, ACL_MEM_MALLOC_HUGE_FIRST)); atb::Tensor output; output.desc.dtype = ACL_FLOAT16; output.desc.format = ACL_FORMAT_ND; output.desc.shape.dimNum = 3; output.desc.shape.dims[0] = 2; output.desc.shape.dims[1] = 3; output.desc.shape.dims[2] = 5; output.dataSize = atb::Utils::GetTensorSize(output); CHECK_STATUS(aclrtMalloc(&output.deviceData, output.dataSize, ACL_MEM_MALLOC_HUGE_FIRST)); atb::infer::AllGatherParam param; param.rank = rank; param.rankRoot = 0; param.rankSize = rankSize; param.backend = "hccl"; atb::Operation *op = nullptr; CHECK_STATUS(atb::CreateOperation(param, &op)); atb::VariantPack variantPack; variantPack.inTensors = {input}; variantPack.outTensors = {output}; ExecuteImpl(op, variantPack, context); std::cout << "rank: " << rank << " executed END." << std::endl; // 资源释放 CHECK_STATUS(atb::DestroyOperation(op)); // 销毁op对象 CHECK_STATUS(aclrtDestroyStream(stream)); // 销毁stream CHECK_STATUS(atb::DestroyContext(context)); // 销毁context CHECK_STATUS(aclFinalize()); std::cout << "demo execute success" << std::endl; } int main(int argc, const char *argv[]) { const int processCount = 2; for (int i = 0; i < processCount; i++) { pid_t pid = fork(); // 子进程 if (pid == 0) { AllGatherSample(i, processCount); return 0; } else if (pid < 0) { std::cerr << "Failed to create process." << std::endl; return 1; } } // 父进程等待子进程执行完成 for (int i = 0; i < processCount; ++i) { wait(NULL); } std::cout << "The communication operator is successfully executed. Parent process exit" << std::endl; return 0; } |