案例介绍
本案例对分组Matmul即GroupedMatmul算子的per-token量化场景进行性能分析和优化,GroupedMatmul算子计算过程(通过python代码表达)为:
1 2 3 4 5 | offset = 0 for i in range(g): mmOut = x[offset:offset + groupList[i]] * weight[i] + bias[i] y[offset:offset + groupList[i]] = Gelu(mmOut * scale[i] * pertokenScale[offset:offset + groupList[i]]) offset += groupList[i] |
验证平台为
优化分析以如下算子规格为例:
input |
shape |
data type |
format |
|---|---|---|---|
x |
(1024,1024) |
int8 |
ND |
weight |
(8,1024,8192) |
int8 |
NZ |
bias |
(8,8192) |
int32 |
ND |
groupList |
8 |
int64 |
ND |
scale |
(8,8192) |
float |
ND |
pertokenScale |
1024 |
float |
ND |
y |
(1024,8192) |
float16 |
ND |
主要介绍以下优化方法:
- 对于Vector计算占比较高(Vector Bound)的场景,将AI Core中的AIC核和AIV核启动比例设置为1:2;
- 优化CV并行流水,减少Cube和Vector计算间的空闲等待时间;
- 优化Vector计算流水,提高Vector并行计算速度。
获取性能数据
固定8核测试,即当前性能和后续优化tiling中blockDim固定设置为8。
通过msProf算子调优工具获取算子性能数据:
- 获取真实环境执行的性能数据(指令的cycle占比数据ArithmeticUtilization.csv),包含各个流水的占比情况;
- 获取仿真性能数据(指令流水图),包含各个流水的占用区间,可观察流水间依赖情况,从而优化并行效率。
分析主要瓶颈点
固定8核进行测试的情况下,通过msprof op命令获取指令的cycle占比数据如下:
图1 指令的cycle占比数据ArithmeticUtilization.csv(性能总耗时为218.1us)

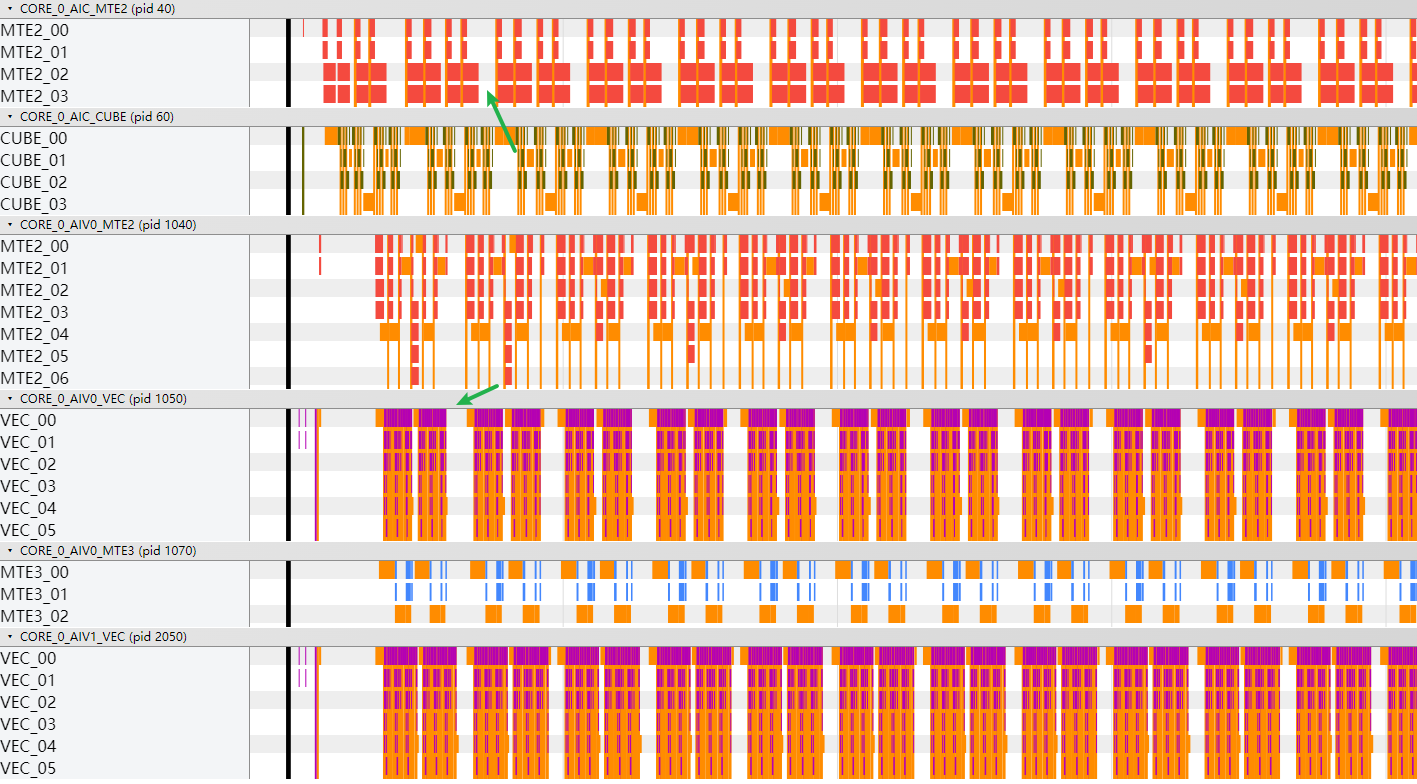
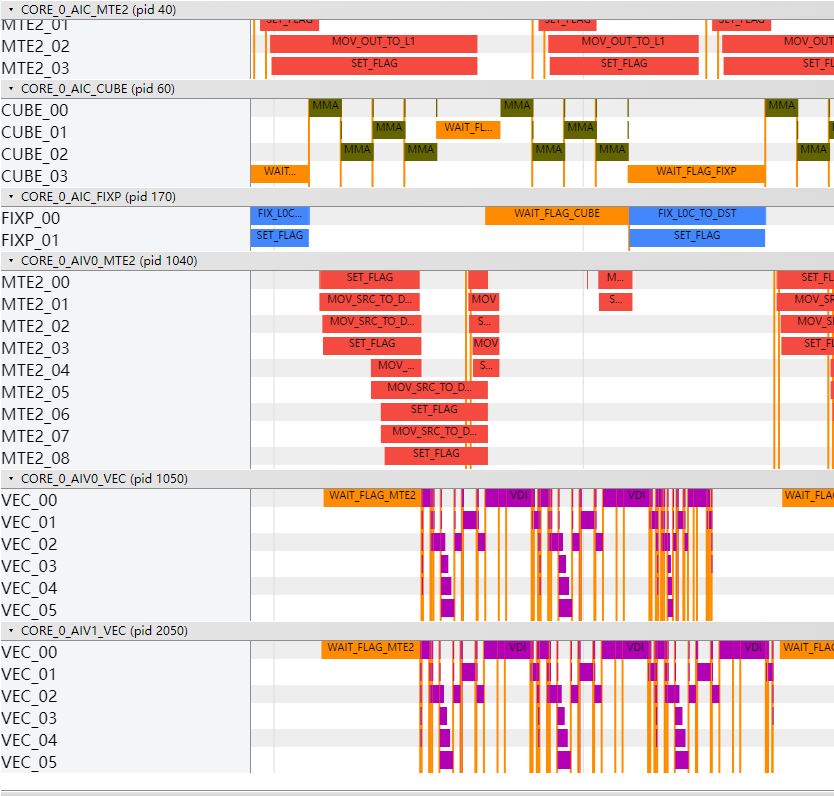
通过msprof op simulator获取到的指令流水图如下图所示:
图2 指令流水图
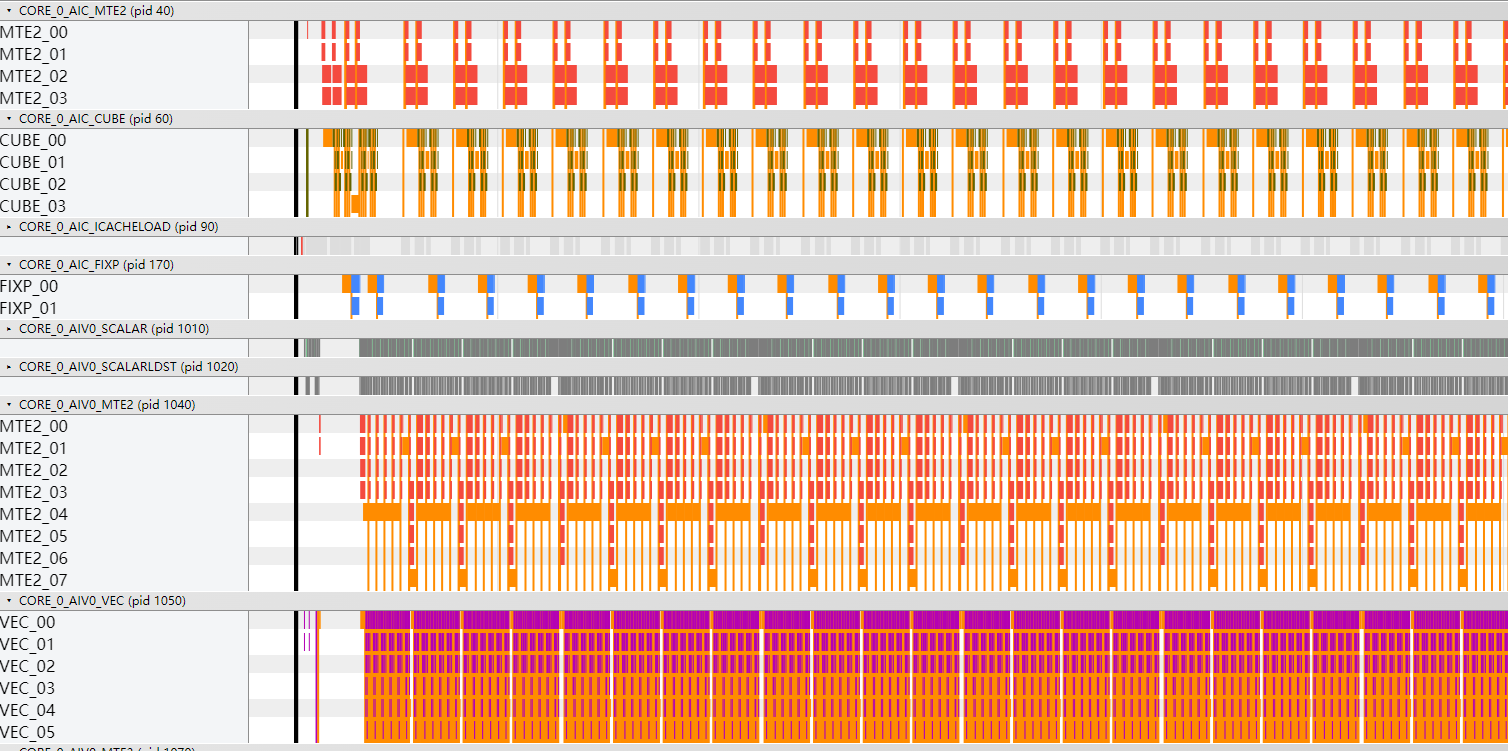
结合上述两种数据(真实数据和仿真数据)进行性能分析:
设计优化方案
- 将AI Core中的AIC核和AIV核启动比例设置为1:2。每次AIC输出的数据,由两个AIV并行计算对应的反量化和激活函数;在Vector侧代码的循环里,AIV0和AIV1交替进行计算(前提条件,循环次数不为1)。代码示例如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
uint32_t vecCount = 0; uint32_t taskRation = GetTaskRation(); for (uint32_t offsetN = 0; offsetN < curCubeSingleN; offsetN += mnConfig.baseN) { if (unlikely(offsetN + mnConfig.baseN >= curCubeSingleN)) { curVecBaseN = curCubeSingleN - offsetN; } uint32_t alignBaseN = Ceil(curVecBaseN, uint32_t(8)) * 8; // 8: num int32_t in 32B ub block DataCopyScale(curVecBaseN, alignBaseN, scaleOffset + offsetN); uint32_t curVecBaseM = vecBaseM; uint64_t mmOutOffset = mnConfig.workSpaceOffset + offsetN * mnConfig.baseM; CrossCoreWaitFlag(SYNC_AIC_TO_AIV); for (uint32_t offsetM = 0; offsetM < curCubeSingleM; offsetM += vecBaseM) { vecCount++; if (vecCount % taskRation != subBlockIdx) { continue; // AIV0和AIV1交替进行计算 } if (unlikely(offsetM + vecBaseM >= curCubeSingleM)) { curVecBaseM = curCubeSingleM - offsetM; } // 使用AscendDequant接口做perchannel反量化 LocalTensor<cT::T> mmOutLocal = vecInQueue.AllocTensor<cT::T>(); DataCopyPad2D(mmOutLocal, mmOutGm[mmOutOffset + offsetM * curVecBaseN], curVecBaseM, curVecBaseN, curVecBaseN); vecInQueue.EnQue(mmOutLocal); ComputeDequantAndActivate(mnConfig, curVecBaseM, alignBaseN, curVecBaseN, offsetM); LocalTensor<DTYPE_Y> yLocal = vecOutQueue.DeQue<DTYPE_Y>(); DataCopyPad2D(yGm[outOffset + offsetM * tiling->n + offsetN], yLocal, curVecBaseM, curVecBaseN, alignBaseN, tiling->n); vecOutQueue.FreeTensor(yLocal); } ...
- AIC和AIV启动比例设置为1:2后,出现Cube和Vector计算各自都有间隙、相互之间都有等待耗时的情况。分析原因是因为Vector和Cube计算存在使用一份workspace进行数据传递的场景,通过4份workspace的方案进行优化:host按4倍baseM * baseN申请workspace,Cube侧代码在计算前可以跳过前4轮的等待。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
if ASCEND_IS_AIC { if (cubeCount >= tiling->parallNum) { // tiling->parallNum设置为4 CrossCoreWaitFlag(SYNC_AIV_TO_AIC); } mm.SetOrgShape(mnConfig.m, tiling->n, tiling->k); mm.SetSingleShape(curSingleM, curSingleN, tiling->k); mm.SetTensorA(xGm[xOffset]); auto weightSlice = weightGm[weightOffset]; if (mnConfig.blockDimM == 1) { weightSlice.SetL2CacheHint(CacheMode::CACHE_MODE_DISABLE); } mm.SetTensorB(weightSlice); uint64_t worskspaceOffset = mnConfig.workSpaceOffset; while (mm.Iterate()) { mm.GetTensorC(mmOutGm[worskspaceOffset], 0, true); CrossCoreSetFlag<2, PIPE_FIX>(SYNC_AIC_TO_AIV); worskspaceOffset += (mnConfig.baseM * mnConfig.baseN); } } cubeCount++;
- Vector计算开启double buffer,InitBuffer指定分配内存块个数为2。
1 2 3 4
pipe->InitBuffer(scaleInQueue, 2, tiling->mmTilingData.baseN * sizeof(DTYPE_SCALE)); pipe->InitBuffer(perTokenScaleInQueue, 2, tiling->mmTilingData.baseM * sizeof(float)); pipe->InitBuffer(vecInQueue, 2, tiling->ubCalSize * sizeof(cT::T)); pipe->InitBuffer(vecOutQueue, 2, tiling->ubCalSize * sizeof(DTYPE_Y));
验证优化方案性能收益
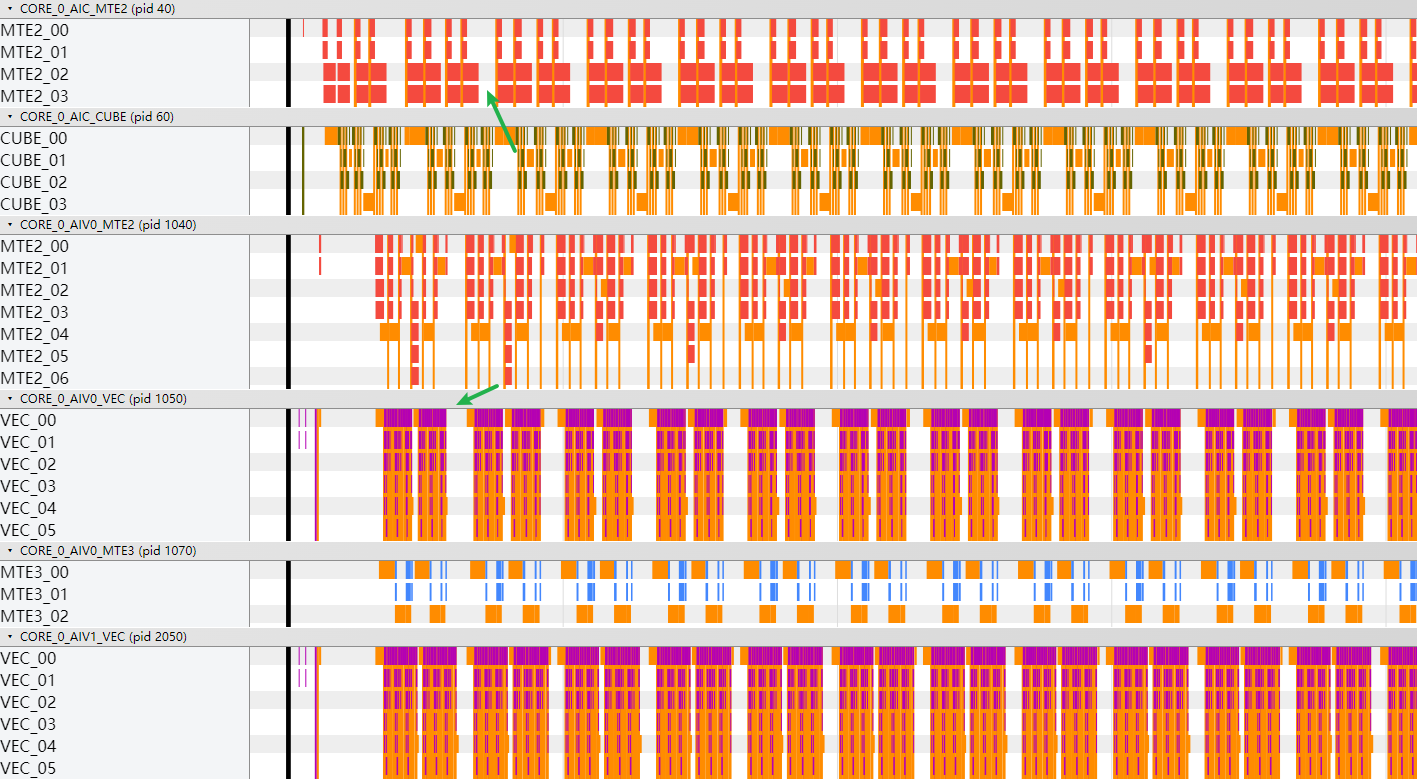
- 将AI Core中的AIC和AIV启动比例设置为1:2后,执行总耗时从218.1us下降为154.2us。指令流水图显示Cube计算间等待变小。
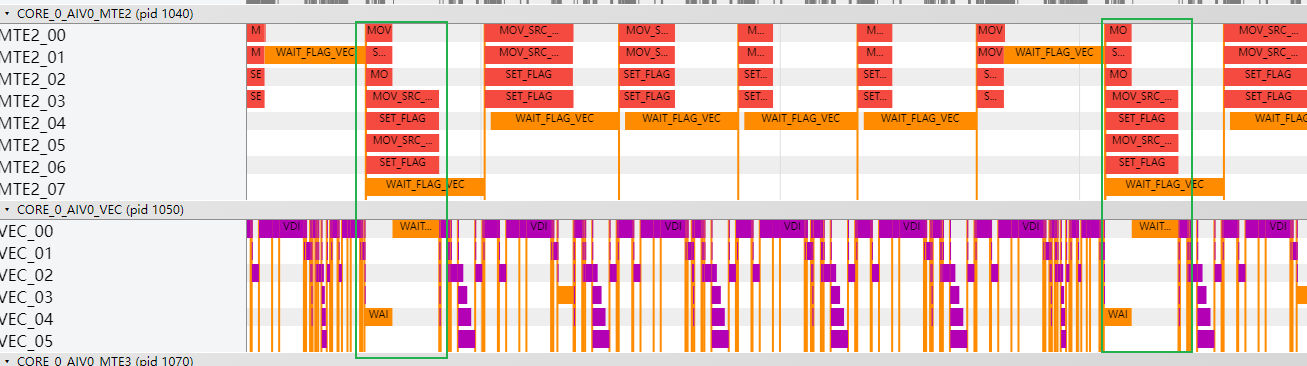
- 如上图所示,Vector计算已经不处于bound状态,但Cube和Vector计算都有间隙,没有用满(上述两个箭头的位置)。分析原因如下:
Vector计算在等Cube计算输出的数据,Cube侧需要等Vector计算完释放workspace以存放下一轮的计算结果,当前为了让Cube、Vector计算流水并行,workspace用了两份空间:

因为Vector和Cube计算存在使用一份workspace进行数据传递的场景,存在数据依赖,所以会有等待的间隔。
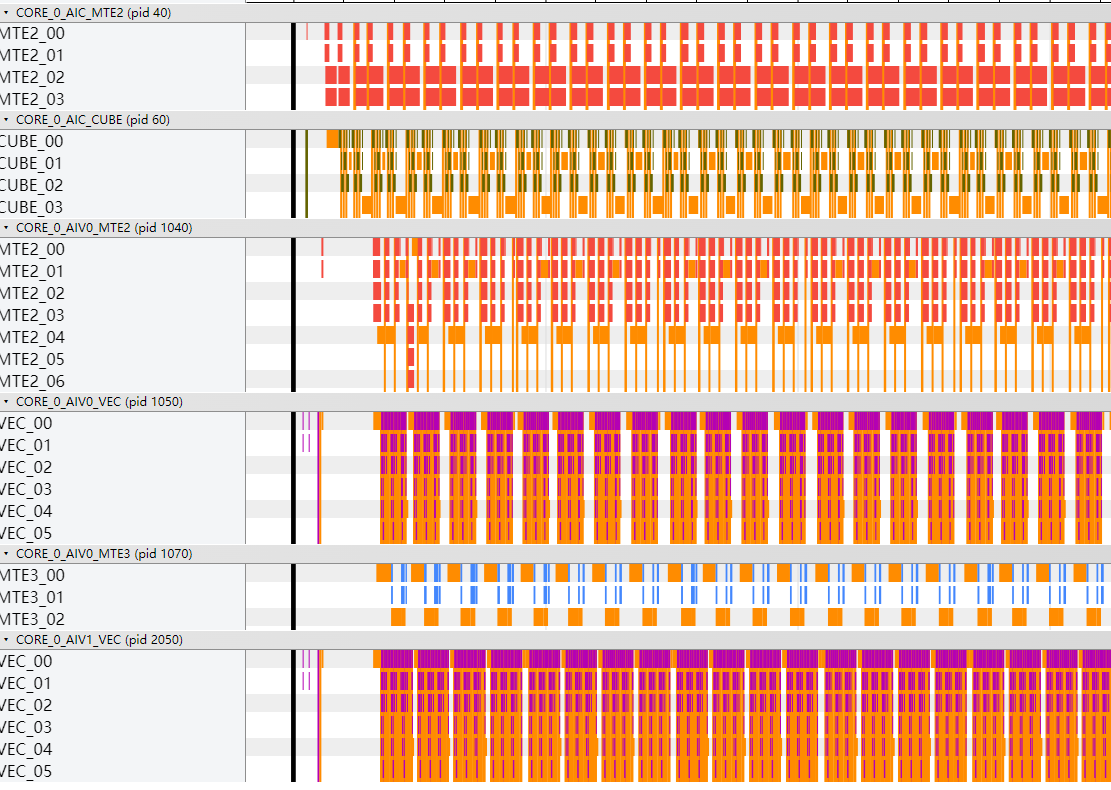
可以采用4份workspace进行优化:

优化后,总耗时由154.2us下降为131.8us。指令流水图显示Vector、Cube计算各自间隙明显减小。
- Vector计算开启double buffer,优化后执行总耗时从131.8us下降为128.1us。
总结
- 在Vector计算为主要瓶颈点时,将AI Core中的AIC核和AIV核启动比例设置为1:2;
- Cube、Vector计算时间接近,且两者都有因相互等待导致的间隙时,采用4份workspace优化;
- 观察数据搬运是否与计算相互掩盖,多轮计算没有数据依赖,且buffer够大时,开启double buffer,增加并行效率。