案例介绍
本案例中的算子FlashAttentionScoreGrad,用于训练场景下计算注意力的反向输出,即FlashAttentionScore算子的反向计算。
已知注意力的正向计算公式为:

为方便表达,以变量S和P表示计算公式:


则注意力的反向计算公式为:


计算流程图如下:
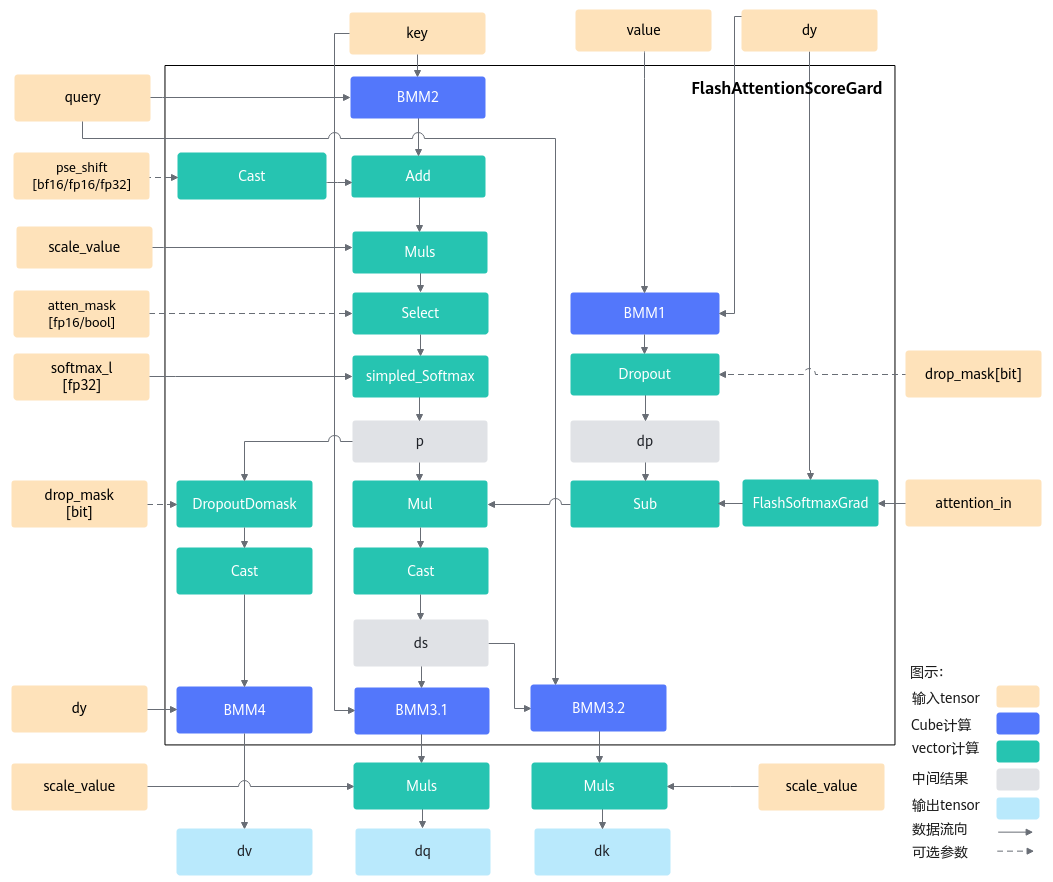
按照FlashAttention反向计算流程的实现,简介整体计算流程如下。对本算子的算法感兴趣的用户可简单了解,无需重点关注。
- 重计算p,本步骤重计算了FlashAttention流程中的softmax结果p,计算结果保存在ub中。
- 计算dp,该计算包含matmul计算和dropout计算,matmul计算中,左矩阵为dy,右矩阵为转置后的value。
- 计算ds,本计算中,FlashSoftmaxGrad计算的入参为dy、正向输出attention_in,该结果与dp做减操作,最终的结果与p相乘得到结果ds。
- 计算dq,本计算将ds结果与key做matmul计算,并将结果与scale相乘得到结果dq。
- 计算dk,本计算将转置后的ds结果与query做matmul计算,并将结果与scale相乘得到结果dk。
- 计算dv,本计算将p的结果做drop计算,转置后与dy做matmul计算。






本案例的验证平台为

获取性能数据
流水优化分析工具包括CAModel和Profiling工具,分别从两个方面分析:第一个是从Profiling工具生成的Profiling数据中分析各项流水的占比,第二个是从CAModel工具生成的打点图分析各流水并行情况。
分析主要瓶颈点
通过观察分析流水图和Profiling数据,结合优化经验来判断性能瓶颈点。在优化过程中不同阶段可能会出现不同的瓶颈点,需要不断优化以达到最佳性能。
- 根据优化经验,循环间会存在一些不必要的性能开销,循环越多性能可能越差;满足UB最大空间限制的情况下,UB切分的基本块越大,循环越少。算子中通过InitBuffer接口分配UB buffer大小。
1 2 3
pipe->InitBuffer(ubBuffer, 120 * 1024); pipe->InitBuffer(tmpBuffer, 30 * 1024); pipe->InitBuffer(vecClc3, 8 * 1024);
如上代码所示,InitBuffer接口的第二个参数表示buffer占用的大小,所有buffer大小的和即为占用的总空间。这里120 * 1024 + 30 * 1024 + 8 * 1024 = 158KB < UB Size,没有充分利用UB空间。
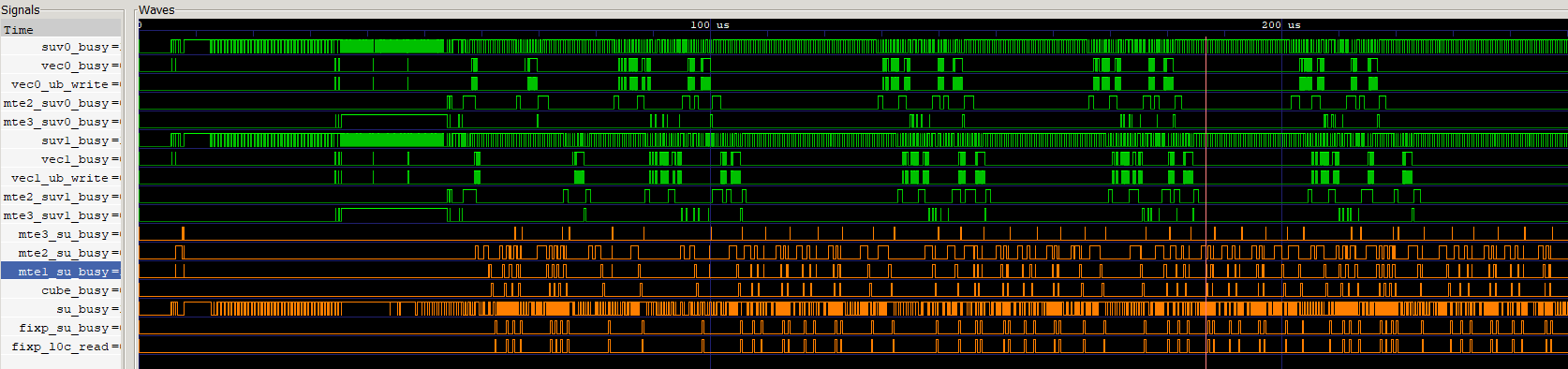
- 观察如下流水图,绿色为Vector侧的流水,橙色为Cube侧的流水,可以看出两侧的流水都存在大段的空隙,CV之间流水很大程度上未并行,需要考虑CV流水优化。
图3 优化前算子流水
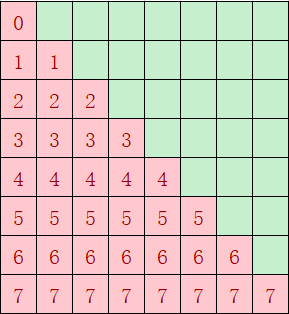
- 对于上述场景一,causal场景下可能存在核间分布不均匀的情况,如下图经过atten_mask掩码后,红色部分是算子需要计算的部分,绿色无需计算;如果不按照基本块的个数来分核,按照第一根轴的大小8(行)来分核,假设平均分到9个核上,每个核做ceil(8 / 9) = 1行,则第1个核只需做1个基本块,但是第8个核需要做8个基本块的计算,出现严重的负载不均衡。因此需要考虑将红色块均匀分到多个核上计算。
图4 causal场景atten_mask形状

- 场景一的Profiling数据如下,aic_fixpipe_ratio占比极高,可能存在FixPipe bound。
图5 场景一Profiling数据

- 场景二的Profiling数据如下,mte2_ratio占比高,可能存在MTE2 bound。
图6 场景二Profiling数据

设计优化方案
- 优化点一:调整tiling基本块
在满足UB空间大小够用的情况下,tiling基本块切分的越大越好。如下图为优化前按照(64, 128)切分计算,总共需要循环计算32次。
图7 优化前计算基本块及次数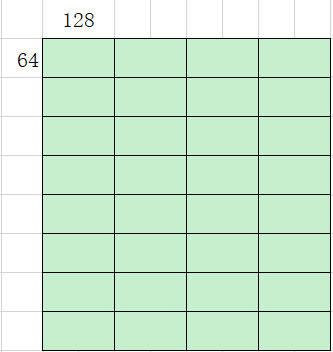
考虑到UB空间没有用满,基本块调整到(128, 128),如下图优化后只需循环计算16次,切分后算子性能提升一倍。
图8 优化后计算基本块及次数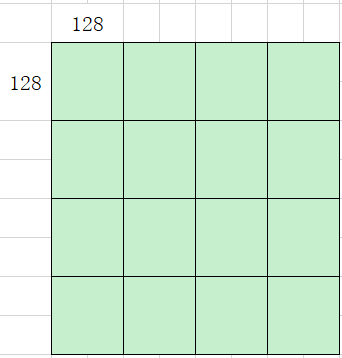
- 优化点二:CV流水并行
由于FAG算子中Cube计算比Vector计算快且存在依赖性,同时为了减少CV之间的通信次数,通过缓存机制实现让matmul提前计算多块,这里的缓存机制指的是将mm一次性计算多个基本块缓存到GM上。如下代码中,SetTail设置的singleCoreM和singleCoreN大小分别为BaseM,BaseN的倍数,即matmul一次发起多个基本块的计算,实现matmul结果的缓存,Vector侧分多次取matmul的结果。
1 2 3 4
mm3.SetTail(s2CvExtend, -1, preS1Extend); mm3.SetTensorA(mulWorkSpaceGm[pingpongIdx * coreNum * cubeBaseMN + cBlockIdx * cubeBaseMN], true); mm3.SetTensorB(queryGm[mm2aTensorOffsetCv]); mm3.template IterateAll<false>(dkWorkSpaceGm[bTensorOffsetCv], true);
图9 完成mm1/mm2/mm3缓存的流水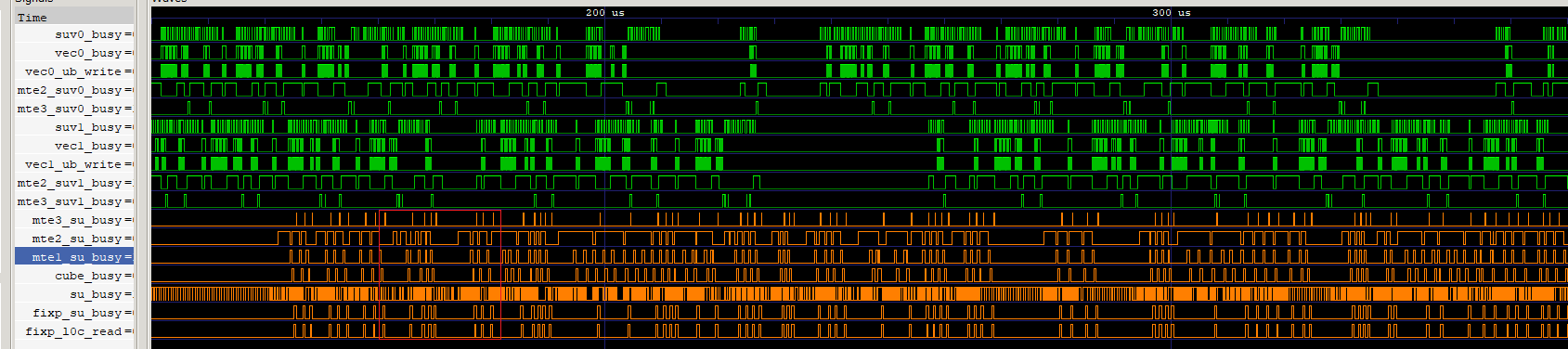
如上图是实现mm1、mm2和mm3缓存的流水图,并行度提高,CV的间隔减小,提升了算子性能。
图10 Vector等Cube流水的间隔插入Vector计算
基于缓存mm1/mm2/mm3的优化后,在本轮Vector计算等Cube流水的间隔,插入下一轮循环的Vector计算,如上图所示,这样使Vector流水与Cube流水之间的并行度更高,反映到流水图中为Vector计算更密集。原计算过程伪代码与在CV间隔中插入下一轮Vector计算的伪代码,分别如以下两段所示。
1 2 3 4 5 6 7 8
// 原计算过程伪代码 // mm1计算; dropout(); Sub(); // mm2计算; Softmax(); AttenMask(); ...
1 2 3 4 5 6 7 8 9 10
// 在Vector等Cube流水的间隔中,插入下一轮循环的Vector计算伪代码 // mm1计算; dropout(); Sub(); dropout(); // 下一轮循环的Vector计算 Sub(); // 下一轮循环的Vector计算 // mm2计算; Softmax(); AttenMask(); ...
- 优化点三:每个核负载均衡
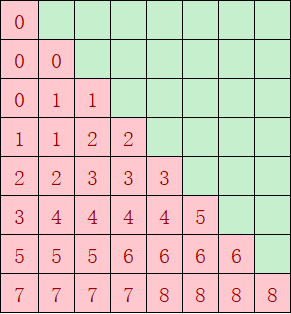
尽量实现每个核的计算量均匀,负载均衡。优化前的分核及每个核的计算量如图11 causal场景优化前每个核计算量所示,按照第一根轴的大小8(行)来分核,平均分到9个核上,每个核计算ceil(8/9)=1行,第1个核只计算1个基本块,但是第8个核计算8个基本块。优化后如图12 causal场景优化后每个核计算量所示,红色块总共36个基本块,均分到每个核上,每个核的计算量为4块,性能提升一倍。
- 优化点四: FIXPIPE优化
从采集的Profiling数据来看,Cube FixPipe占比高达81%,出现了很严重的bound(达到上限)。CAModel工具打印发现存在很多异常的128B搬运,排查代码,发现workspace地址未512B对齐。
图13 场景一优化前Profiling数据
代码实现中使用SetGlobalBuffer接口设置workspace的起始地址,如果起始地址不是按照512B对齐,搬运效率会很低,可以强制GM地址512Byte对齐来避免这个情况。下面代码中ADDR_ALIGN_SIZE即为512。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
// init workspace address syncGlobal.SetGlobalBuffer((__gm__ int32_t*)workspace); uint64_t workspaceOffsets = SYNC_GLOBAL_WORKSPACE_SIZE; dqWorkSpaceGm.SetGlobalBuffer((__gm__ float*)workspace + workspaceOffsets / sizeof(T2)); workspaceOffsets = (workspaceOffsets + qPostBlockTotal * sizeof(float) + ADDR_ALIGN_SIZE) / ADDR_ALIGN_SIZE * ADDR_ALIGN_SIZE; dkWorkSpaceGm.SetGlobalBuffer((__gm__ float*)workspace + workspaceOffsets / sizeof(T2)); workspaceOffsets = (workspaceOffsets + kvPostBlockTotal * sizeof(float) + ADDR_ALIGN_SIZE) / ADDR_ALIGN_SIZE * ADDR_ALIGN_SIZE; dvWorkSpaceGm.SetGlobalBuffer((__gm__ float*)workspace + workspaceOffsets / sizeof(T2)); workspaceOffsets = (workspaceOffsets + kvPostBlockTotal * sizeof(float) + ADDR_ALIGN_SIZE) / ADDR_ALIGN_SIZE * ADDR_ALIGN_SIZE; // matmul1 and matmul2 workspace size matmulWorkspaceSize = cubeBaseMN * sizeof(float); mm1WorkspaceGm.SetGlobalBuffer((__gm__ T2*)(workspace + workspaceOffsets + cBlockIdx * matmulWorkspaceSize)); mm2WorkspaceGm.SetGlobalBuffer((__gm__ T2*)(workspace + workspaceOffsets + coreNum * matmulWorkspaceSize + cBlockIdx * matmulWorkspaceSize)); // drop workspace offset workspaceOffsets = (workspaceOffsets + coreNum * cubeBaseMN * sizeof(float) * INPUT_NUMS + ADDR_ALIGN_SIZE) / ADDR_ALIGN_SIZE * ADDR_ALIGN_SIZE; dropWorkSpaceGm.SetGlobalBuffer((__gm__ T1*)workspace + workspaceOffsets / sizeof(T1)); // mul workspace offset workspaceOffsets = (workspaceOffsets + coreNum * cubeBaseMN * sizeof(half) * 2 + ADDR_ALIGN_SIZE) / ADDR_ALIGN_SIZE * ADDR_ALIGN_SIZE; mulWorkSpaceGm.SetGlobalBuffer((__gm__ T1*)workspace + workspaceOffsets / sizeof(T1));
修改代码,workspace地址经过512B对齐后,FixPipe时间减半。
图14 场景一优化后Profiling数据
- 优化点五:MTE2优化
结合如下的Profiling数据和流水图,可以看出MTE2 bound,且部分MTE2搬运时间异常。
图15 场景二Profiling数据 图16 场景二流水图
图16 场景二流水图
将输入数据排布格式从BSH更改为BNSD后,数据搬运连续,不需要跳地址读取数据,搬运效率提升一倍,部分异常搬运时长降低了一半。
验证优化方案性能收益
- 调整tiling基本块:理论评估Vector切块越大,计算和搬运循环次数越少,同时能够充分利用搬运带宽和Vector算力。基本块大小从(64, 128)增大到(128, 128)后,性能提升一倍,实测与理论分析一致。
- CV流水并行:CV流水掩盖的时间即为提升的性能,符合预期的收益。
- 核间负载均衡:优化前负载最多的核计算量减少的倍数,即为预期提升的性能;案例中优化前负载最多的核的计算量大小为8块,优化后为4块,实际性能提升一倍,符合预期的收益。
- FixPipe优化:从Profiling数据看出FixPipe占比0.8,优化后占比0.55,实测算子性能提升45%,与理论分析一致。
- MTE2优化:从Profiling数据看出MTE2占比0.52,优化后占比减少一半,实测算子性能提升30%,与理论分析一致。
总结
融合算子场景,可参考此优化。